Lecture 2: Numerical Methods
October 26, 2023
1.1 Plasma parameters
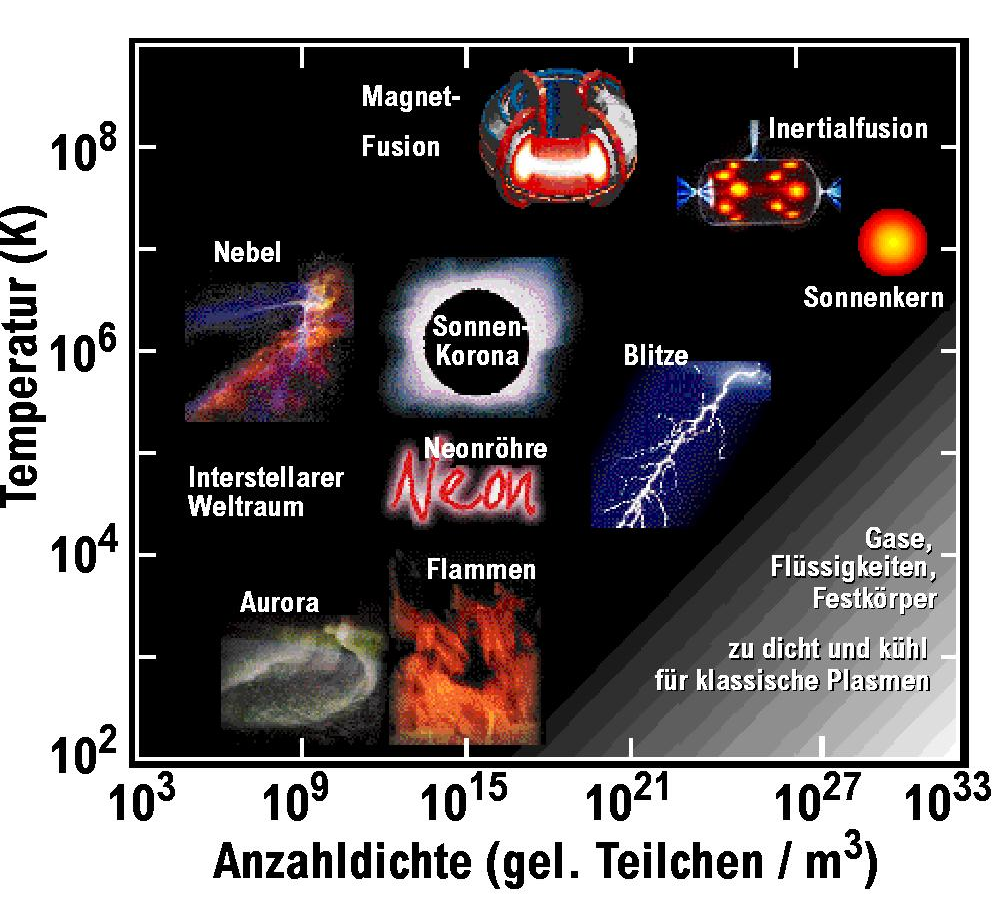
- Temperature
- Number density
- Magnetic field (not in the figure)
- Cold plasmas
- Hot plasmas
1.2 Collisions in plasmas
- Plasmas can be partially or fully ionized.
- Scattering is different: collisions among and with neutrals: large angle scattering.
- Charged particles: smooth small angle scattering only.
- Collisions enforce thermal equilibrium.
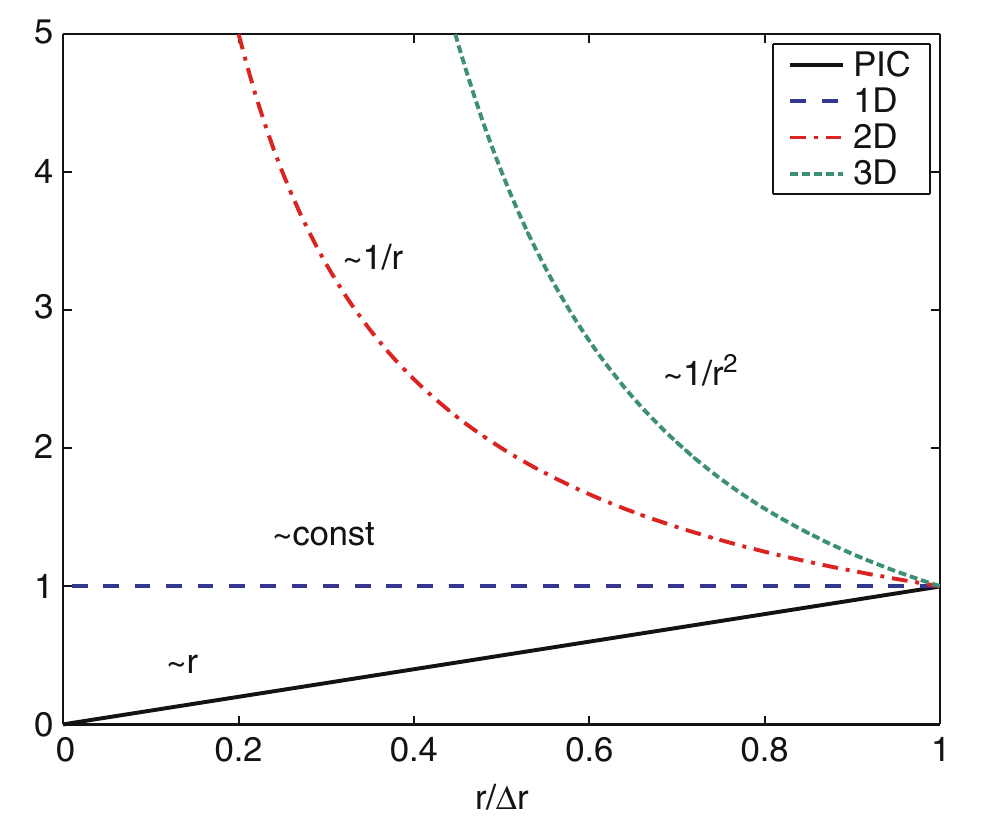
1.3 Length scales: Debye length
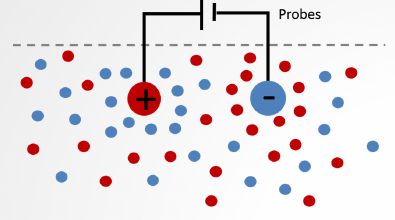
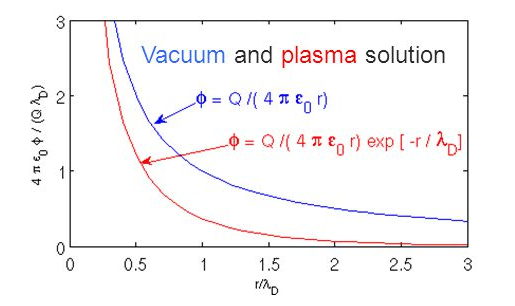
- The Coulomb potential of each particle is shielded by other charges \[\phi_D=\frac{q}{4\pi\epsilon_0 r}\exp\left(-r/\lambda_{De}\right).\]
- The electrostatic potential is screened out on distances larger than the Debye length \[ \lambda_{De} = \sqrt{\frac{\epsilon_0 k_B T_e}{n_e e^2}}. \]
- The plasma is quasi-neutral only for distances \(L\gg \lambda_{De}\).
- At sub-Debye length scales, charge separation occurs.
- An ideal plasma must have a sufficient number of particles in a Debye sphere to enforce their collective behavior. Plasma parameter \[ N_D=n_e \left( \frac{4}{3}\pi \right)\lambda_{De}^3 \gg 1. \]
1.4 Time scales: Plasma frequency
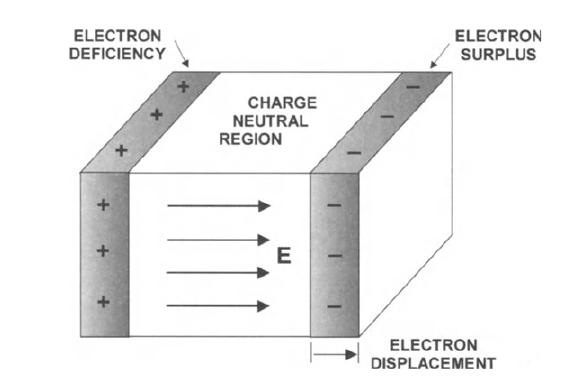
- Plasma frequency \[ \omega_{pe}=\sqrt{\frac{n_e e^2}{\epsilon_0 m_e}}. \]
- Typical response of electrons to restore quasineutrality when disturbed by external forces.
- Note that \[ \omega_{pe}= \frac{v_{th,e}}{\lambda_{De}}=\frac{\sqrt{\frac{k_BT_e}{m_e}}}{\lambda_{De}}. \]
- Collective behaviour
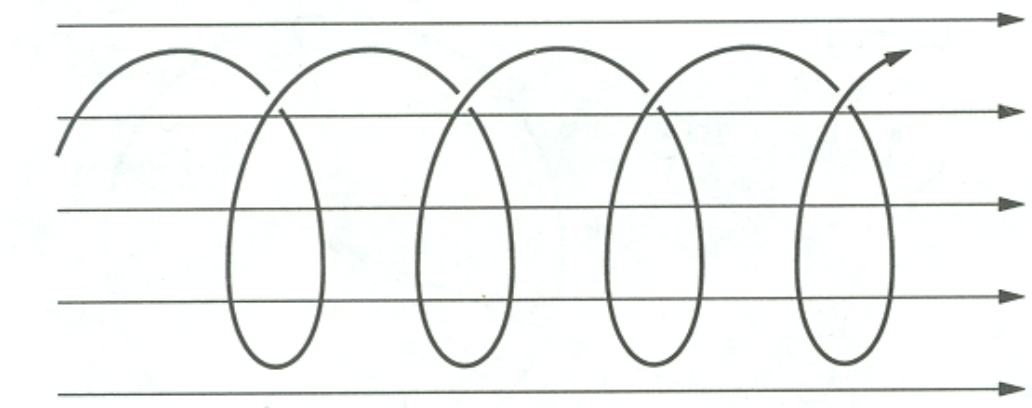
1.5 Time scales: Magnetic field and gyromotion
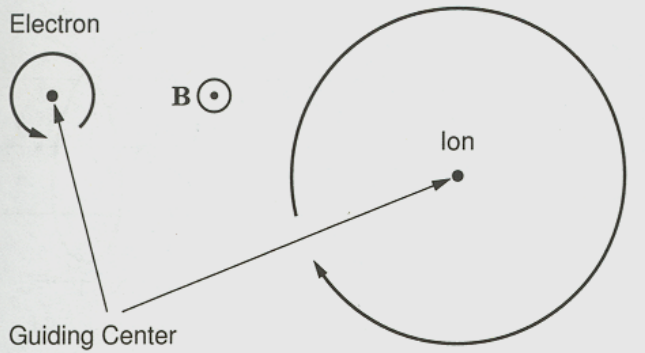
- Single particle motion and Lorentz force \[ m\frac{d\vec{v}}{dt}=q\vec{v}\times\vec{B} \]
- Gyro/cyclotron/Larmor-frequency \[ \Omega_c=\frac{qB}{m} \]
- Gyro/Larmor-radius \[ \rho=\frac{|v_{\perp}|}{\Omega_c}=\frac{m|v_{\perp}|}{|q|B} \] (usually \(|v_{\perp}|=v_{th}\)).
- Ratio of thermal to magnetic pressure. Plasma-\(\beta\) \[ \frac{nk_BT}{\frac{B^2}{2\mu_0}} \propto \left(\frac{\omega_{pe}}{\Omega_{ce}}\right)^2\left(\frac{v_{th}}{c}\right)^2. \]
1.7 Plasma parameters
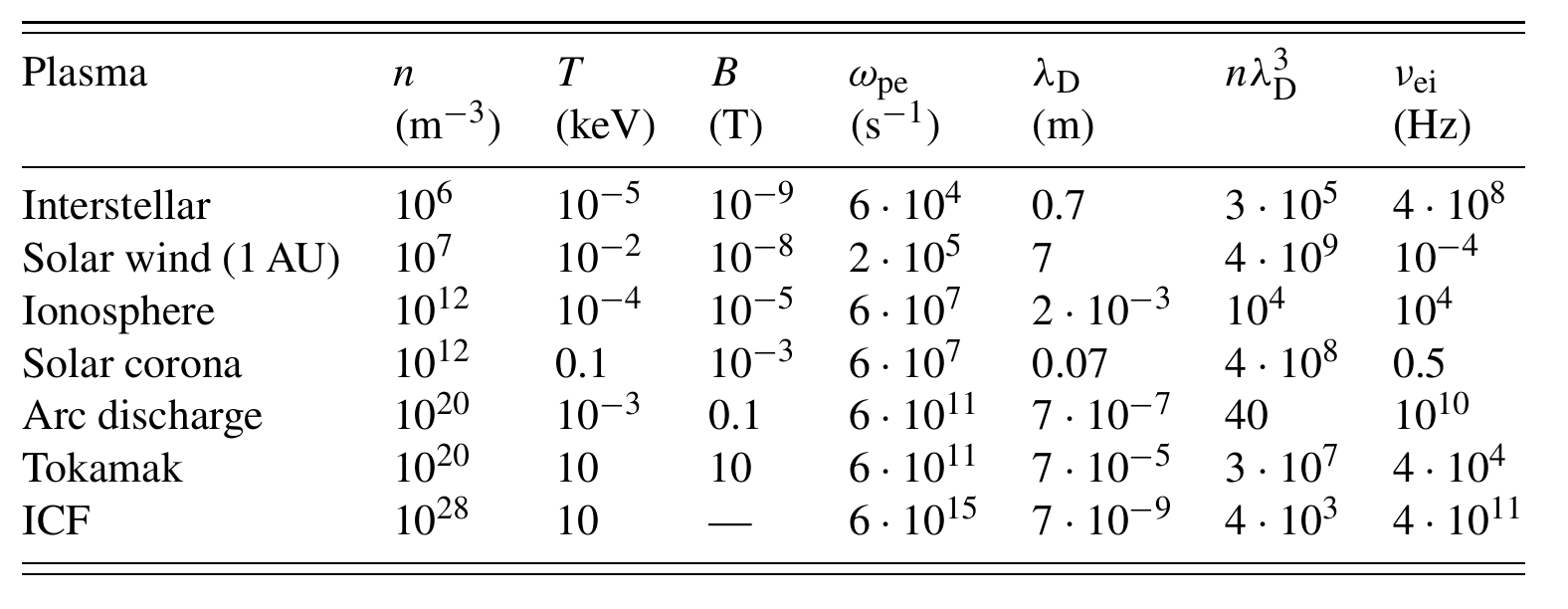
ICF = Inertial Confinement Fusion
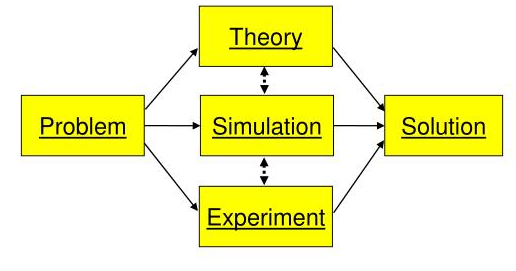
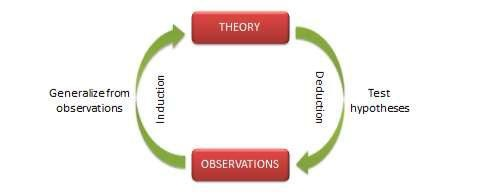
2.1 The role of simulations in science
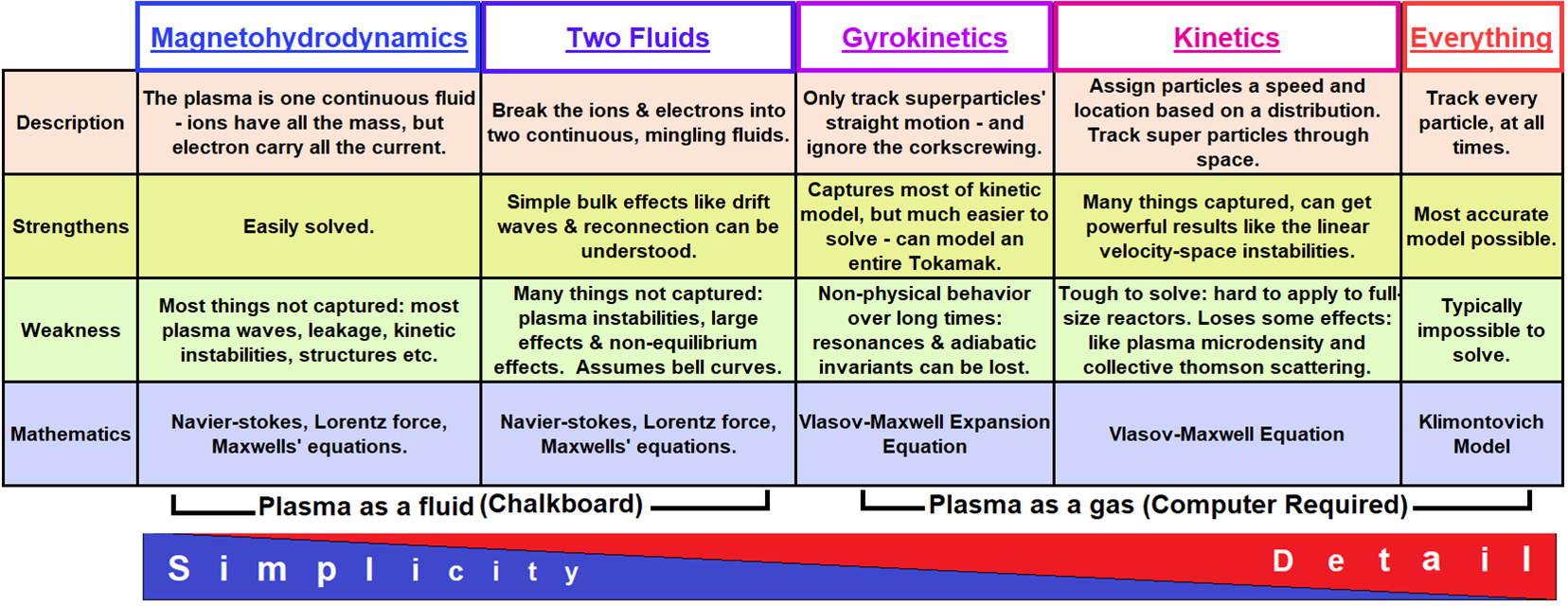
2.2 Hierarchy of plasma physics models
Kinetic description
Microscopic properties, it uses the velocity distribution function \(f(\vec{x}, \vec{v}, t)\).
Fluid description
Uses a few macroscopic quantities, averages of the distribution function (mean velocity \(v(\vec{x},t)\), pressure/temperature). Valid for exact or near thermodynamic equilibrium.
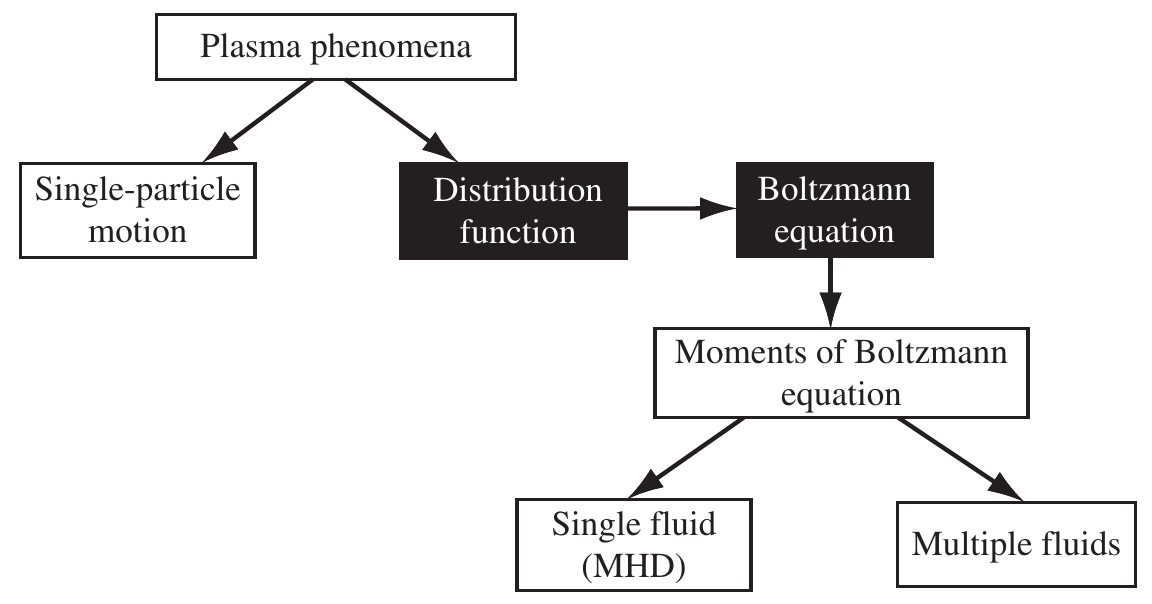
Hierarchy of plasma physics models
2.3 Validity of plasma models
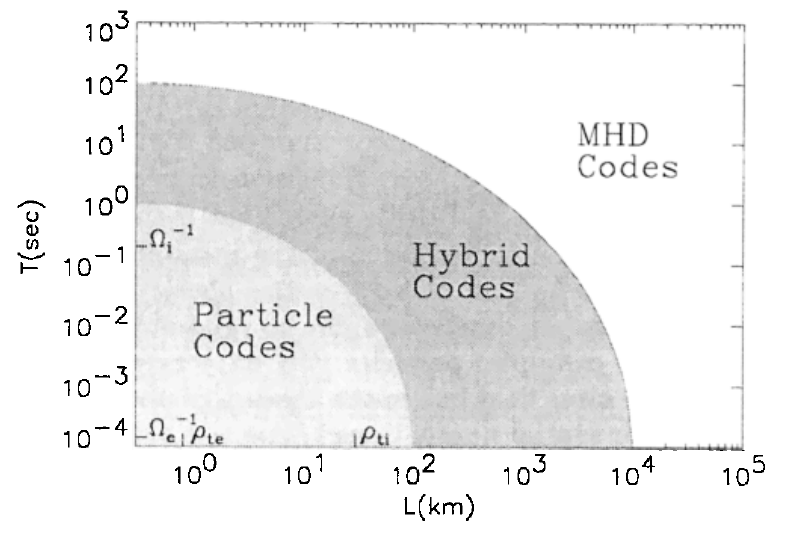
Range of validity of different plasma codes based on typical magnetospheric parameters: \(n=50cm^{-3}\), \(B=50 nT\), \(T_e=T_i=100 eV\) (Winske and Omidi 1996).
2.4 Validity of plasma models
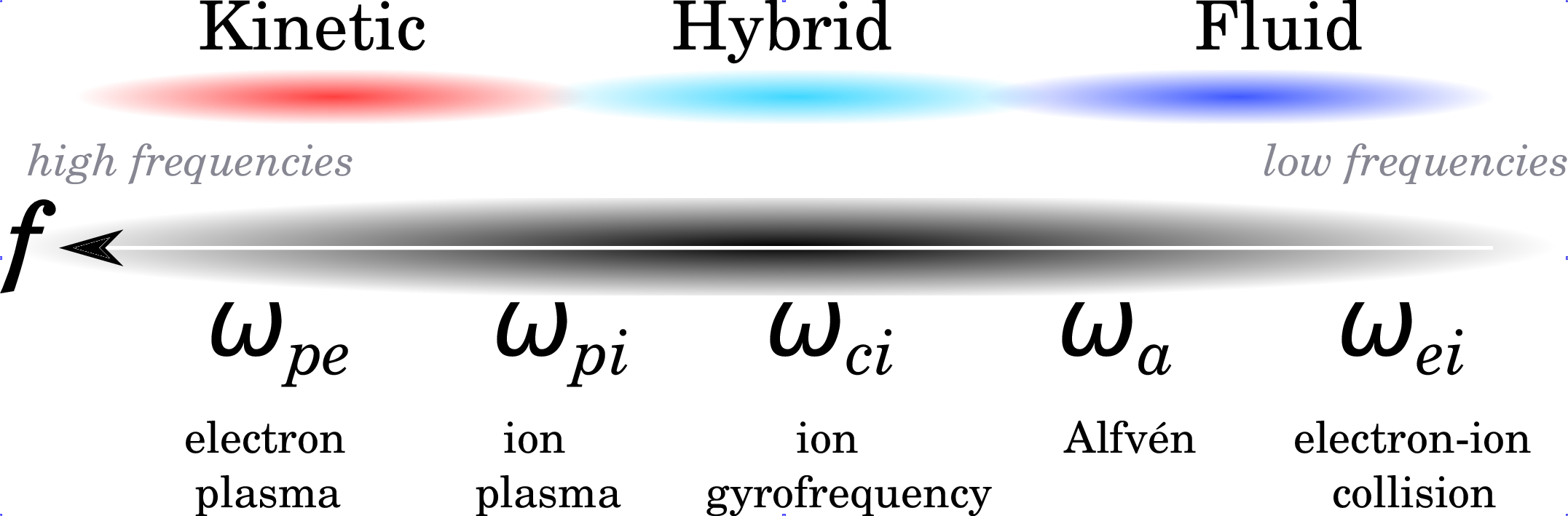 Validity range of different plasma codes for a weakly collisional plasma [Credits: space.aalto.fi.]
Validity range of different plasma codes for a weakly collisional plasma [Credits: space.aalto.fi.]
2.7 Advantages and drawbacks of plasma simulations codes
5.3 Modeling study

https://xkcd.com/2323/
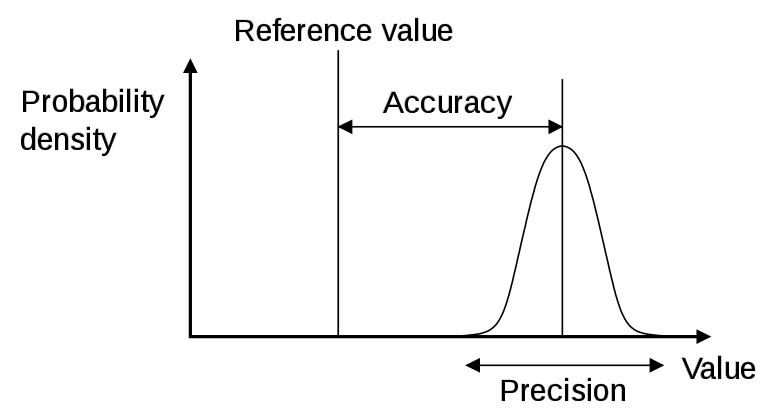
6.6 Accuracy and precision
6.7 Improved Euler’s method
- We can improve the naive Euler’s method by averaging the slopes at \((t_i,y_i)\) and \((t_{i+1},y_{i+1})\): \[ y_{i+1}^*=y_i+\Delta t\, f(t_i,y_i) \\ y_{i+1} =y_i+\Delta t\frac{f(t_i,y_i)+f(t_{i+1},y_{i+1}^*)}{2}\\ \]
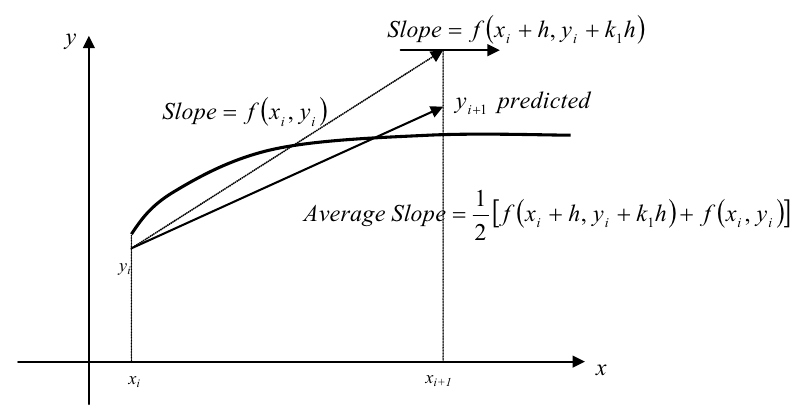
- This method predicts \(y_{i+1}\) by the direct Euler’s method and then corrects it.
- Basis for the predictor-corrector schemes.
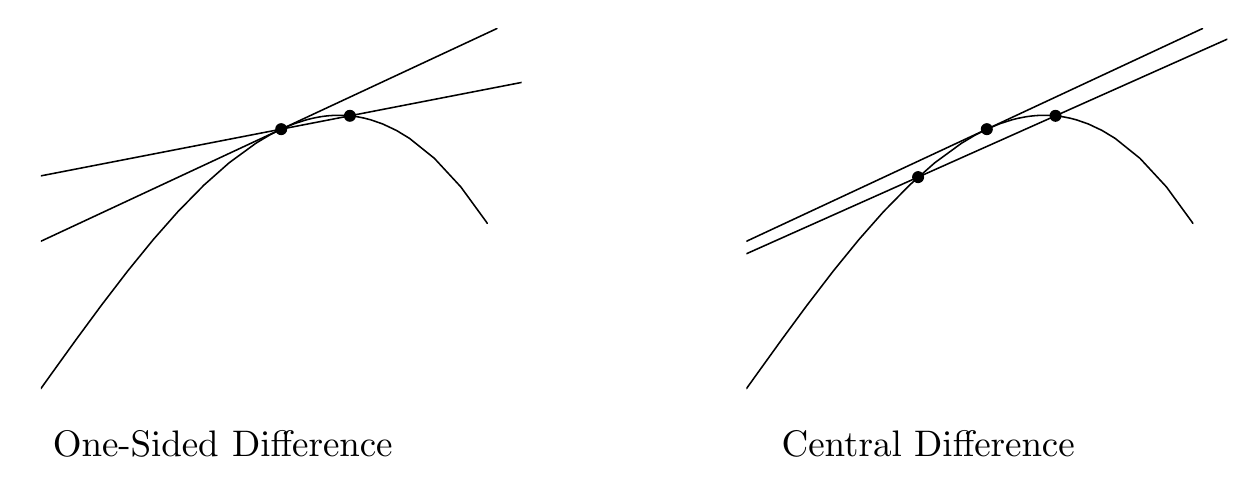
6.9 Finites difference: forward vs centered
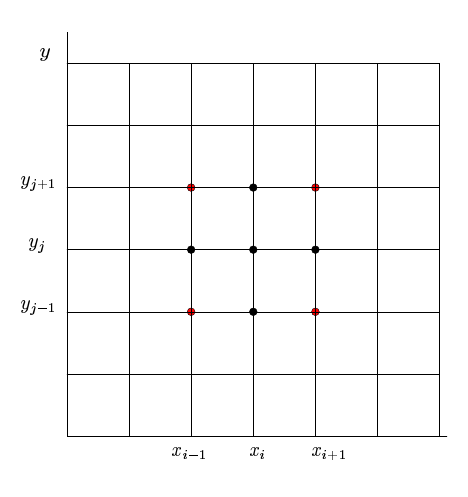
6.11 Finite differences in two variables
For 2D domains (e.g., in PDEs), we can generalize the previous procedure by using, e.g, a five-point stencil \[ \left(\frac{\partial^2 f}{\partial x \partial y}\right)_{i,j}=\frac{\left(\frac{\partial f}{\partial y}\right)_{i+1,j}-\left(\frac{\partial f}{\partial y}\right)_{i-1,j}}{2\Delta x} \approx \frac{f_{i+1,j+1}-f_{i+1,j-1}-f_{i-1,j+1}+f_{i-1,j-1}}{4\Delta x\Delta y} \]
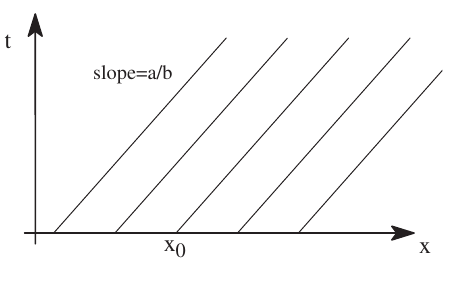
7.2 Characteristics of PDEs
- Curves in the space of independent variables of a PDE, along which the PDE has only total differentials
- Solution/characteristics: \[ x = x_0 + \frac{b}{a}t\\ u = u_0 + \frac{c}{a}t\\ \]
- Note that if \(c=0\), \(u\) is constant on the characteristics.
- For non constant \(c\), \(u\) grows linearly in time along a characteristic \(\Rightarrow\) the initial profile \(u(x,0)\) already determines the solution along the characteristics
7.10 Hyperbolic PDEs
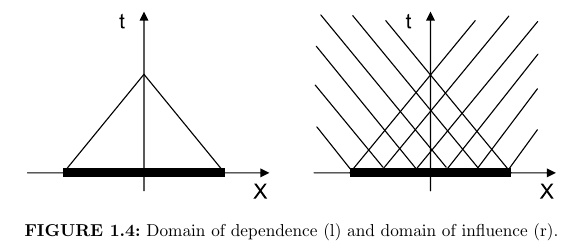
Characteristics of a hyperbolic wave equation. Left: Domain of dependence. Right: Domain of influence Jardin (2010)
7.15 Initial vs Boundary conditions

(a) Initial (Cauchy) vs (b) Boundary value problems (Press et al. (2007)). In (a) the arrows indicate time.
7.20 CFL condition
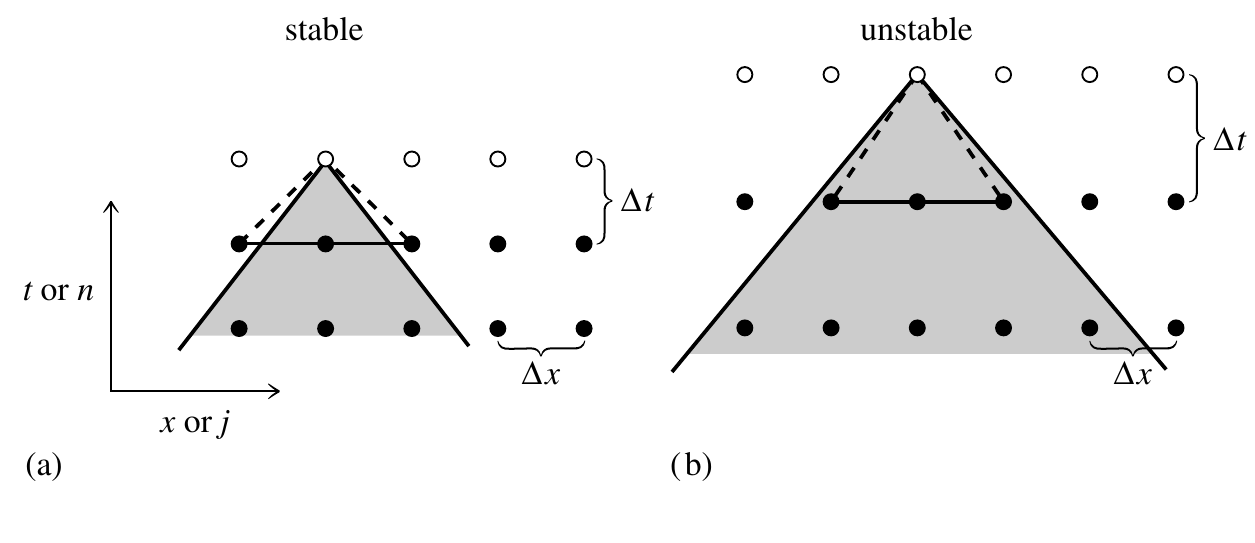
CFL condition Jardin (2010)
7.27 Solution methods for elliptic PDEs
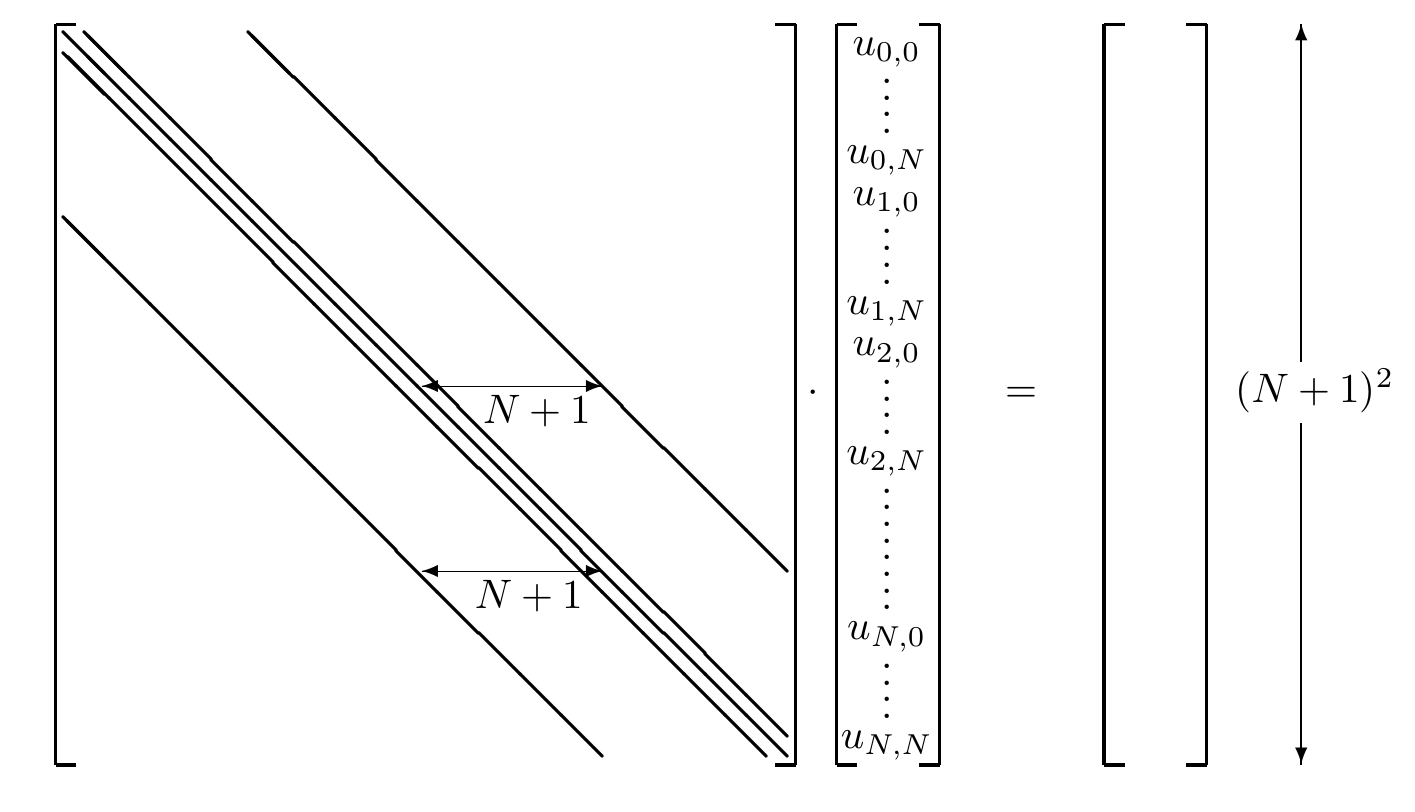
Sparse matrix \(\hat{A}\):
- Must be inverted to solve for the unknowns (although the actual inverse is not normally calculated). Some methods are:
- Direct inversion using Gauss or LU decomposition
- Direct inversion using block tri-diagonal methods
- Iterative methods (multigrid, Krylov space methods). A physical approach involves adding time derivatives terms (converting it to parabolic/hyperbolic equations), and advancing it in time until a steady state is obtained.
- Direct methods based on transform techniques (e.g., Fourier transformation)
7.28 Multigrid methods
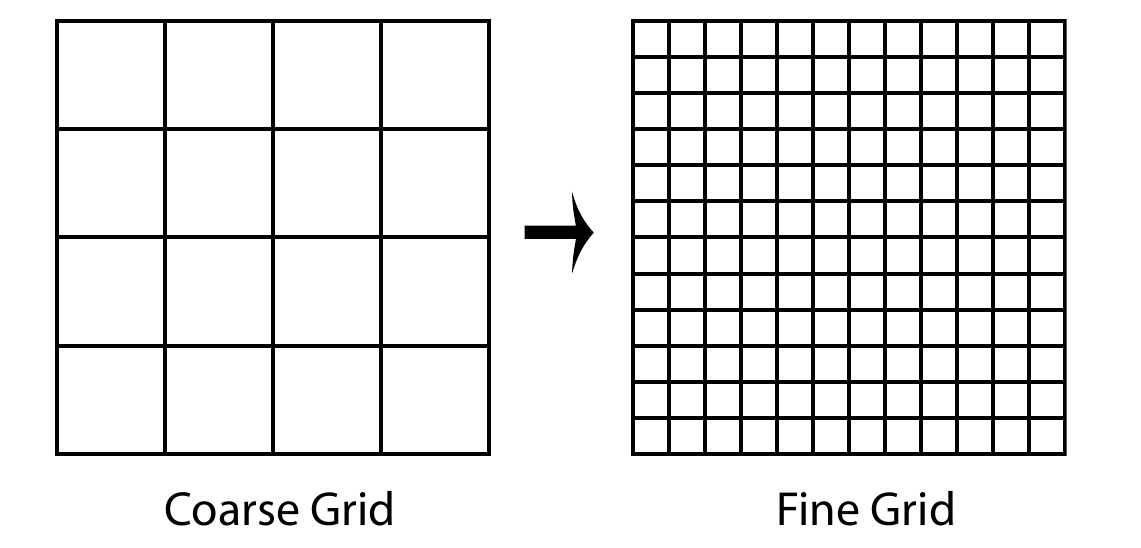
Schematics of multigrid method
- Iterative methods benefit greatly from a good initial guess: A coarse grid solution can be used to initialize a finer grid iteration
- On a given grid, the short wavelengths components of the error decay much faster than the long wavelengths. So, the coarse mesh is more efficient in handling long components of the error but the fine mesh is needed for the short wavelength components.
- The error satisfies the same matrix eqs. as the unknown.
- Two basic steps: nested iteration (for the initial guess), coarse grid correction.