Lecture 3: Test particles – lecture
November 7, 2024
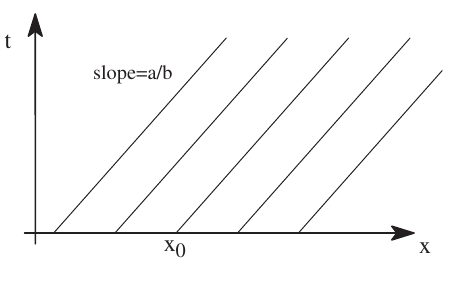
1.2 Characteristics of PDEs
- Curves in the space of independent variables of a PDE, along which the PDE has only total differentials
- Solution/characteristics: \[ x = x_0 + \frac{b}{a}t\\ u = u_0 + \frac{c}{a}t\\ \]
- Note that if \(c=0\), \(u\) is constant on the characteristics.
- For non constant \(c\), \(u\) grows linearly in time along a characteristic \(\Rightarrow\) the initial profile \(u(x,0)\) already determines the solution along the characteristics
1.13 Hyperbolic PDEs
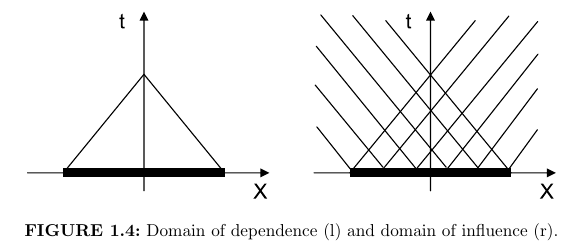
Characteristics of a hyperbolic wave equation. Left: Domain of dependence. Right: Domain of influence (Jardin (2010)).
1.16 Initial vs Boundary conditions
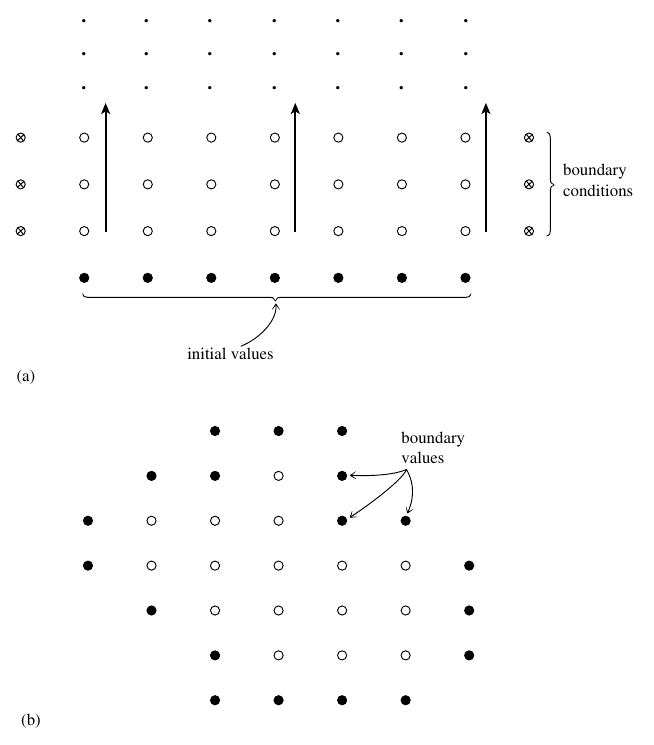
(a) Initial (Cauchy) vs (b) Boundary value problems (Press et al. (2007)). In (a) the arrows indicate time.
1.21 CFL condition
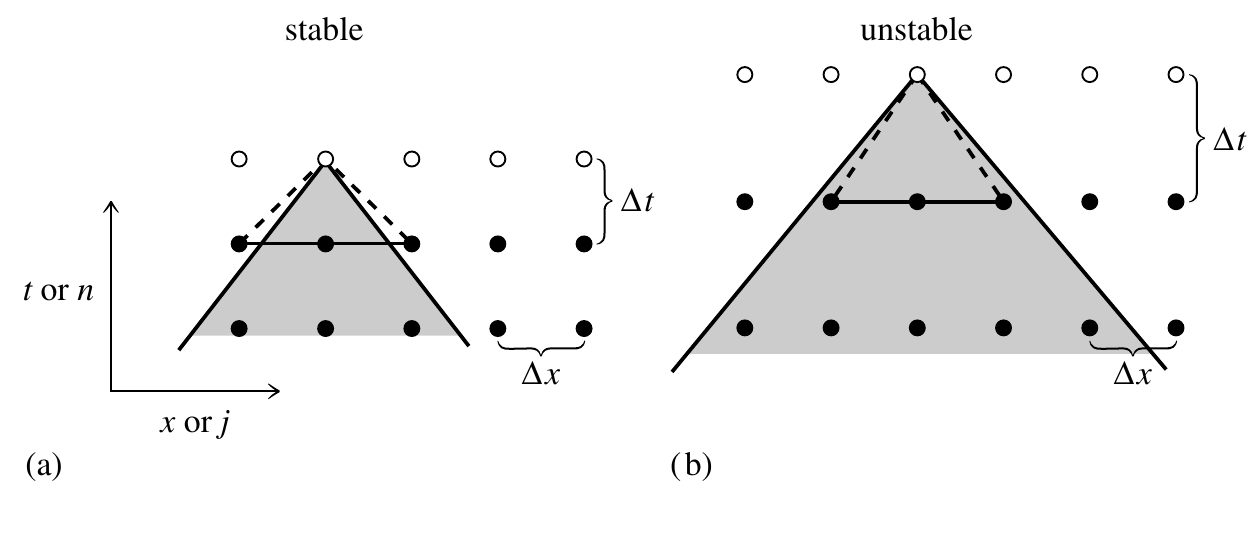
CFL condition (Jardin (2010)).
1.28 Solution methods for elliptic PDEs
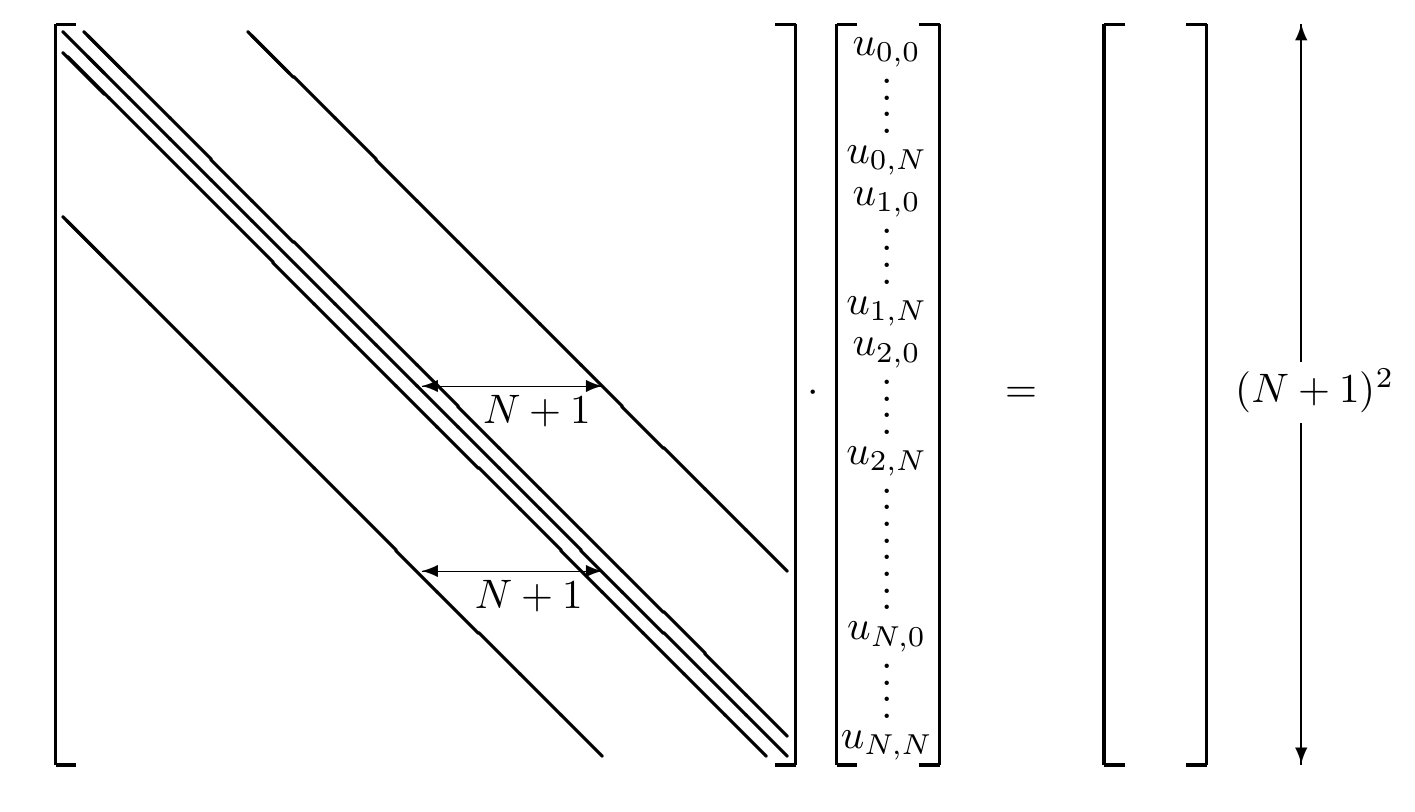
Sparse matrix \(\hat{A}\):
- Must be inverted to solve for the unknowns (although the actual inverse is not normally calculated). Some methods are:
- Direct inversion using Gauss or LU decomposition
- Direct inversion using block tri-diagonal methods
- Iterative methods (multigrid, Krylov space methods). A physical approach involves adding time derivatives terms (converting it to parabolic/hyperbolic equations), and advancing it in time until a steady state is obtained.
- Direct methods based on transform techniques (e.g., Fourier transformation)
1.29 Multigrid methods
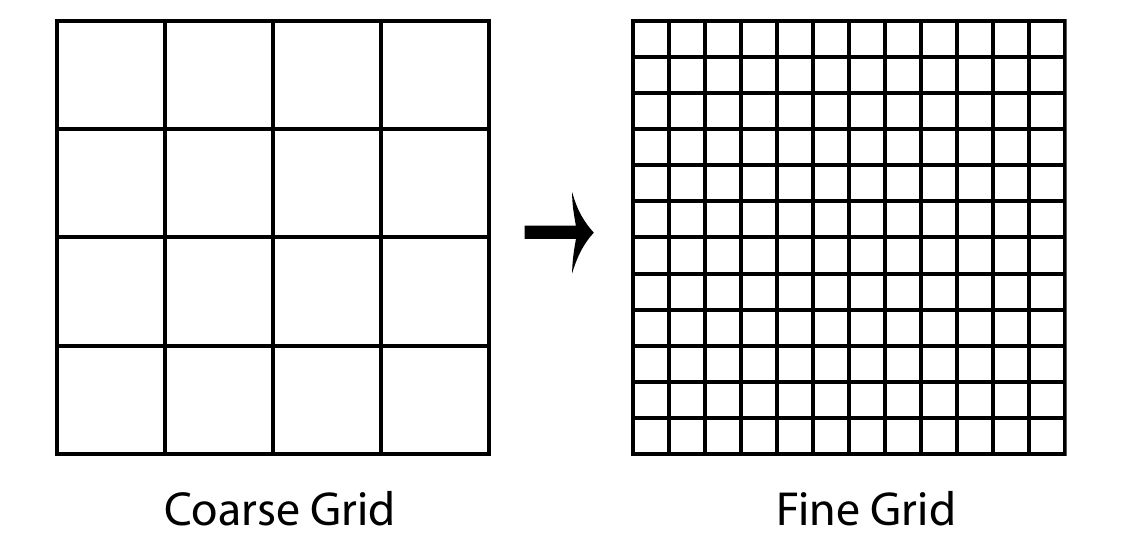
Schematics of multigrid method
- Iterative methods benefit greatly from a good initial guess: A coarse grid solution can be used to initialize a finer grid iteration
- On a given grid, the short wavelengths components of the error decay much faster than the long wavelengths. So, the coarse mesh is more efficient in handling long components of the error but the fine mesh is needed for the short wavelength components.
- The error satisfies the same matrix eqs. as the unknown.
- Two basic steps: nested iteration (for the initial guess), coarse grid correction.
2.2 Hierarchy of plasma physics models
Kinetic description
Microscopic properties, it uses the velocity distribution function \(f\).
Fluid description
Uses a few macroscopic quantities, averages of the distribution function (mean velocity, pressure/temperature). Valid for or near thermodynamic equilibrium.
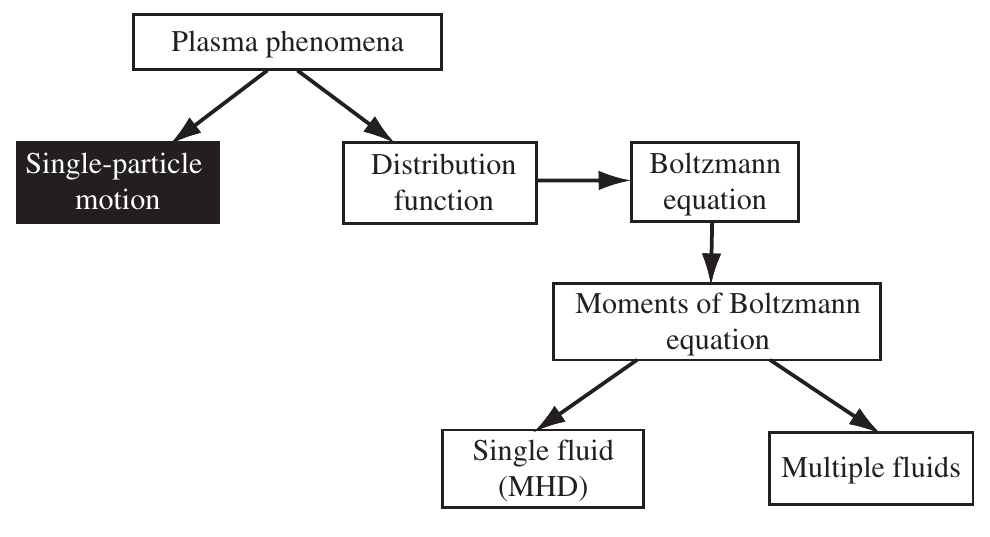
Hierarchy of plasma physics models
2.3 Motivation example (1/5)
Particles released during solar flare
2.4 Motivation example (2/5)
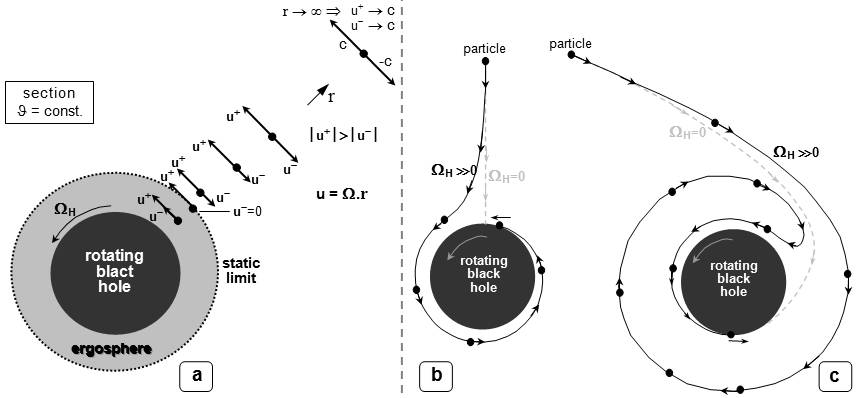
Particle motion around black holes
2.5 Motivation example (3/5)
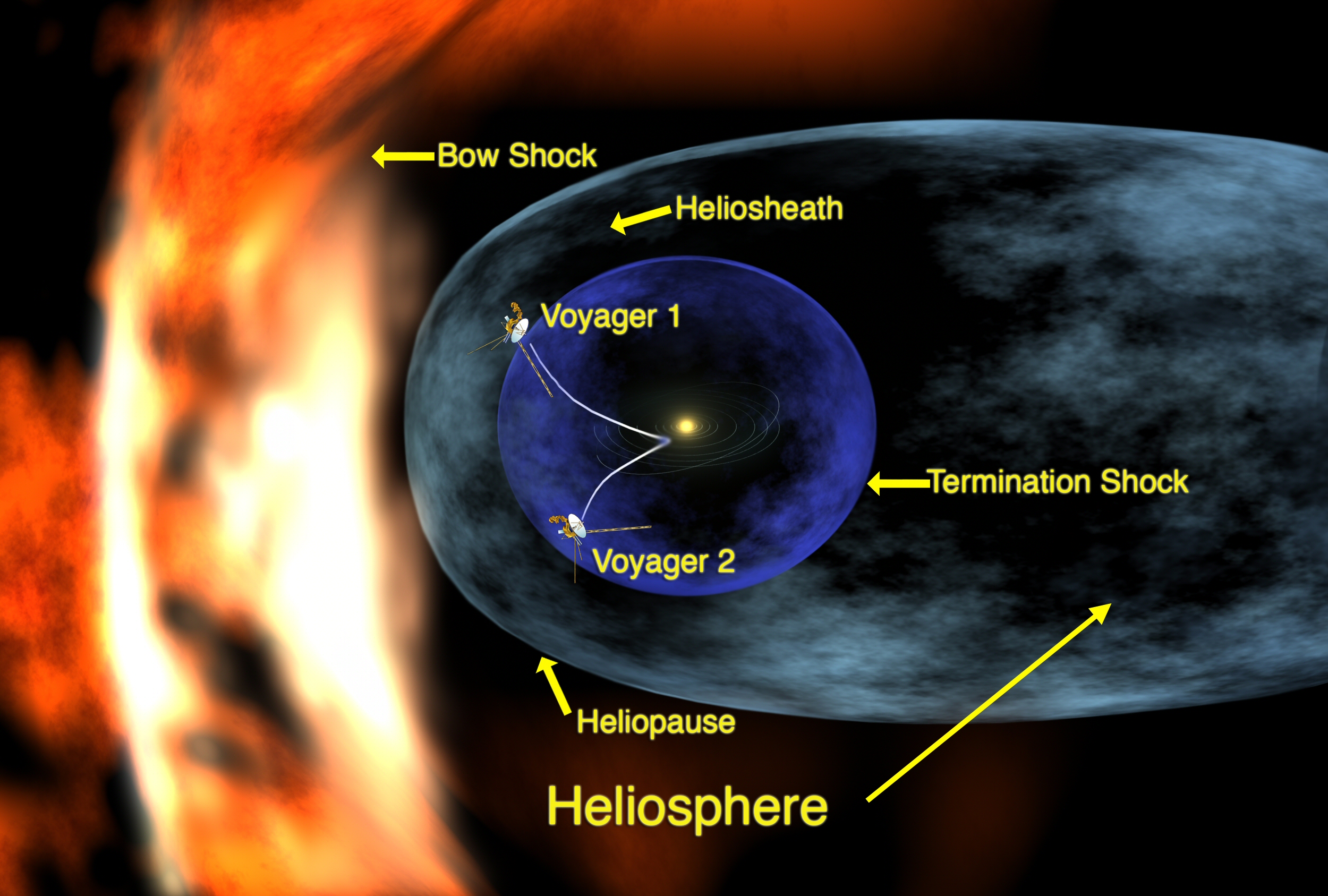
Particles hitting space probes (Voyager)
2.6 Motivation example (3/5)
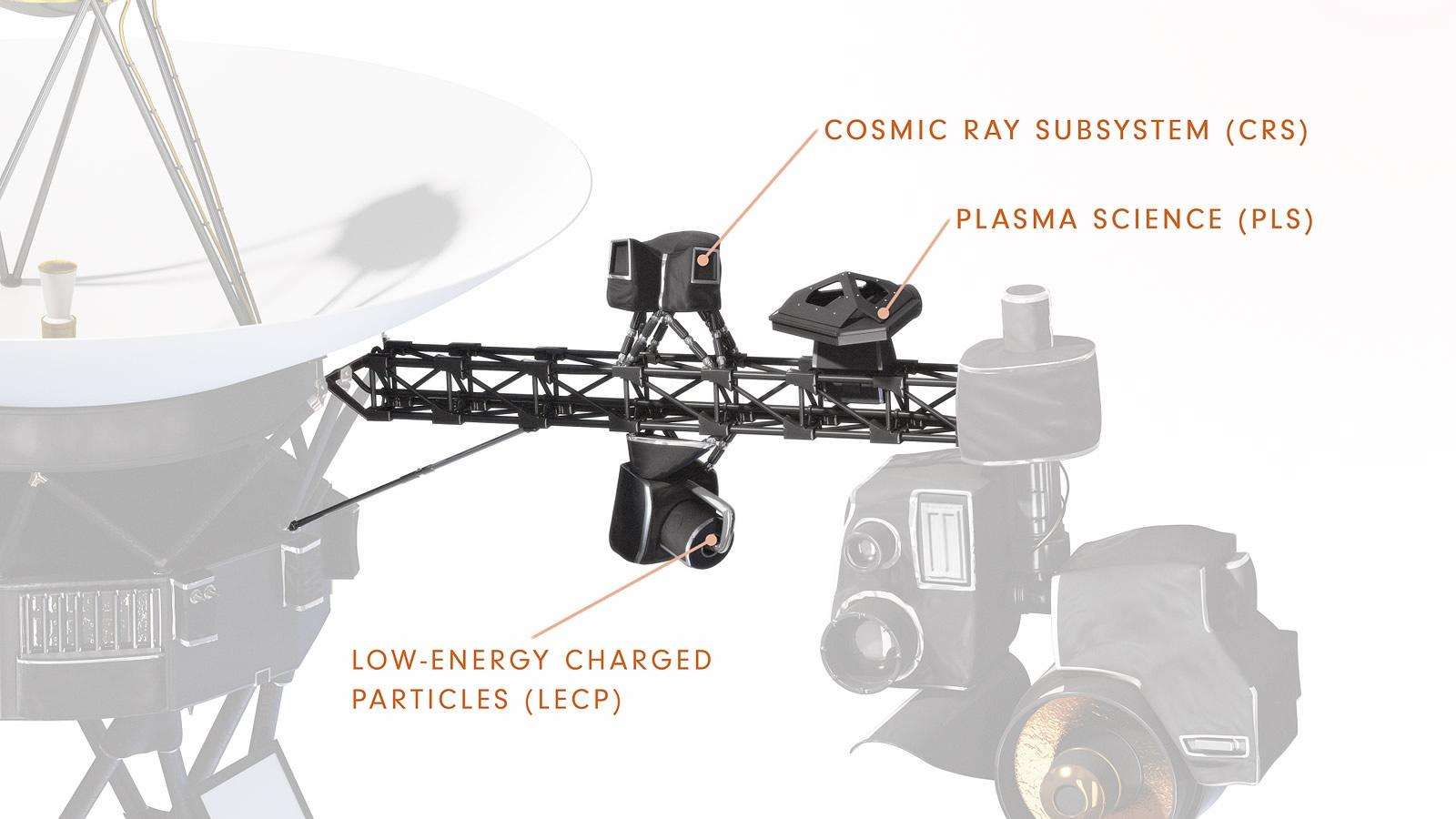
Particles hitting space probes (Voyager)
2.7 Motivation example (4/5)
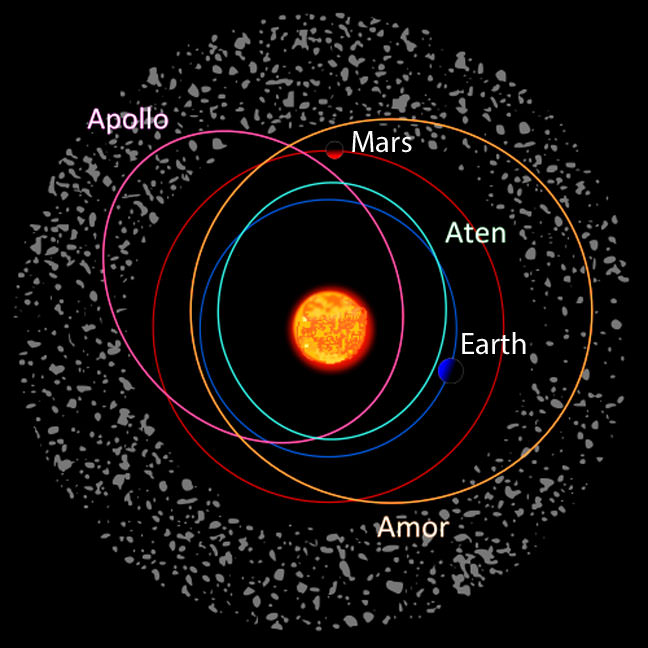
Asteroid motion in space system - potential threat on the Earth
2.8 Motivation example (5/5)
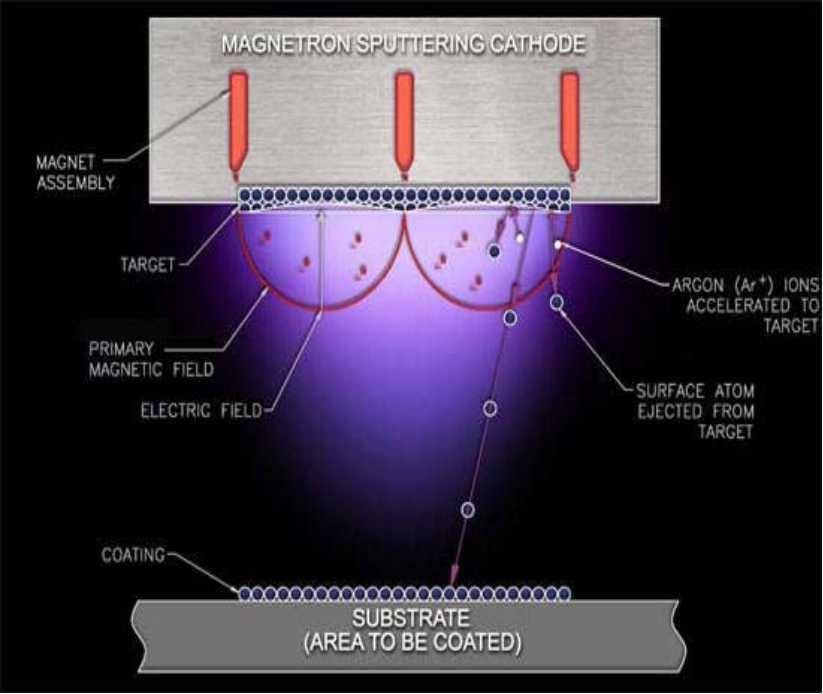
Magnetron coating
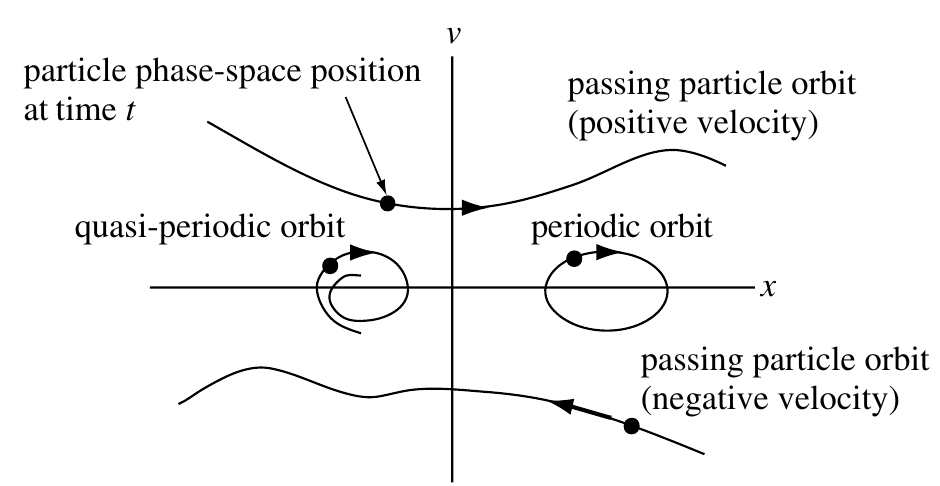
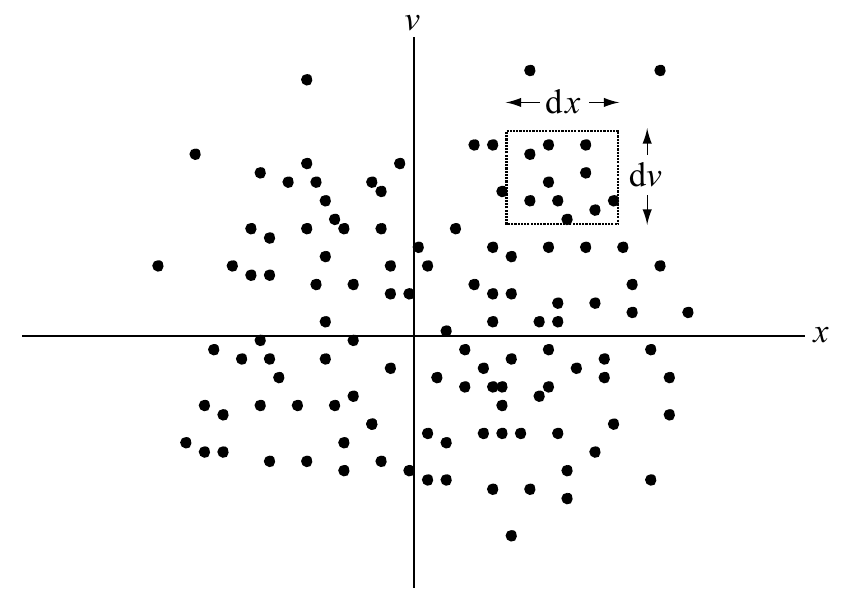
2.9 Distribution function and phase space
- Distribution function \(f(\vec{x},\vec{v},t)\)
- Probability density of finding any particle in the phase space volume element \([x,x+dx],[y,y+dy],[z,z+dz]\) and with velocities \([v_x,v_x+dv_x],[v_y,v_y+dv_y],[v_z,v_z+dv_z]\) such that: \[ d^6N = f(\vec{x},\vec{v},t)\cdot d^3\vec{x} \cdot d^3\vec{v} \]
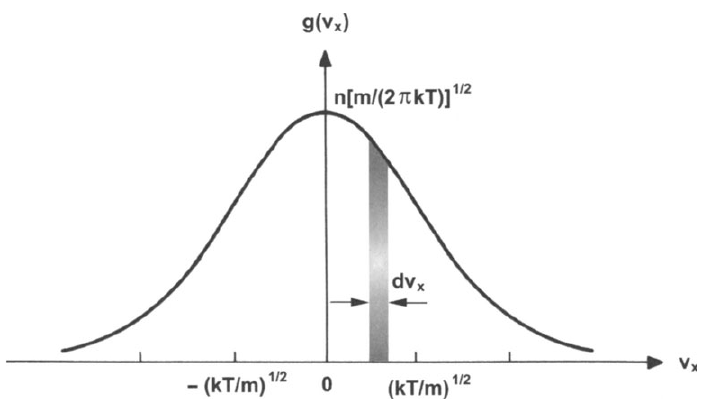
2.10 Maxwell-Boltzmann distribution function
- The Maxwell-Boltzmann distribution represents the thermal equilibrium. It is a stationary and homogeneous solution of the kinetic equations. \[ f_{\alpha} (\vec{v},T_\alpha)=n_{0{\alpha}}\left(\frac{m_{\alpha}}{2\pi k_B T_{\alpha}}\right)^{3/2}\exp\left(-\frac{m_{\alpha}\vec{v}^2}{2k_BT_{\alpha}}\right) \]

2.12 Physicists encountering a new field
Title text: If you need some help with the math, let me know, but that should be enough to get you started! Huh? No, I don’t need to read your thesis, I can imagine roughly what it says. https://xkcd.com/793/
3.5 4th-order Runge Kutta
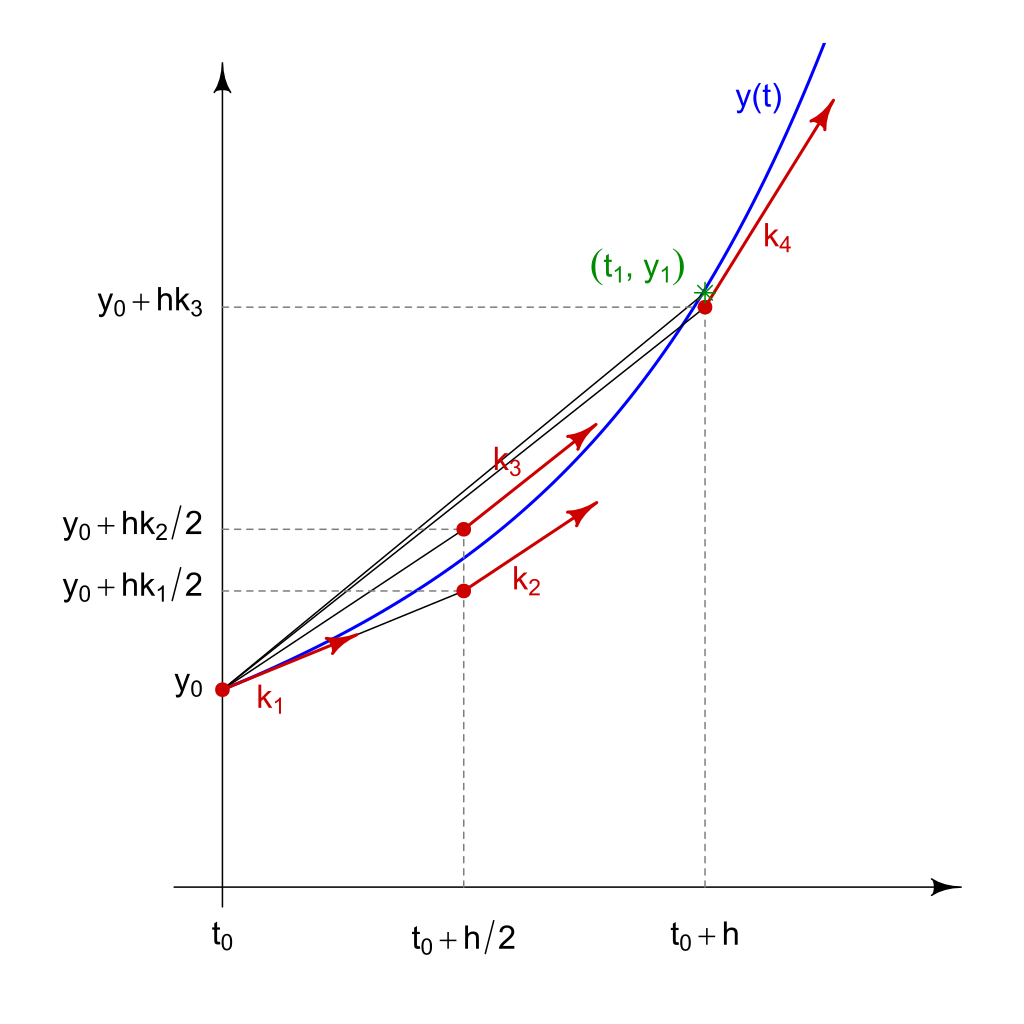
Slopes used for the Runge-Kutta method; \(h = \Delta t\)
3.6 4th-order Runge Kutta
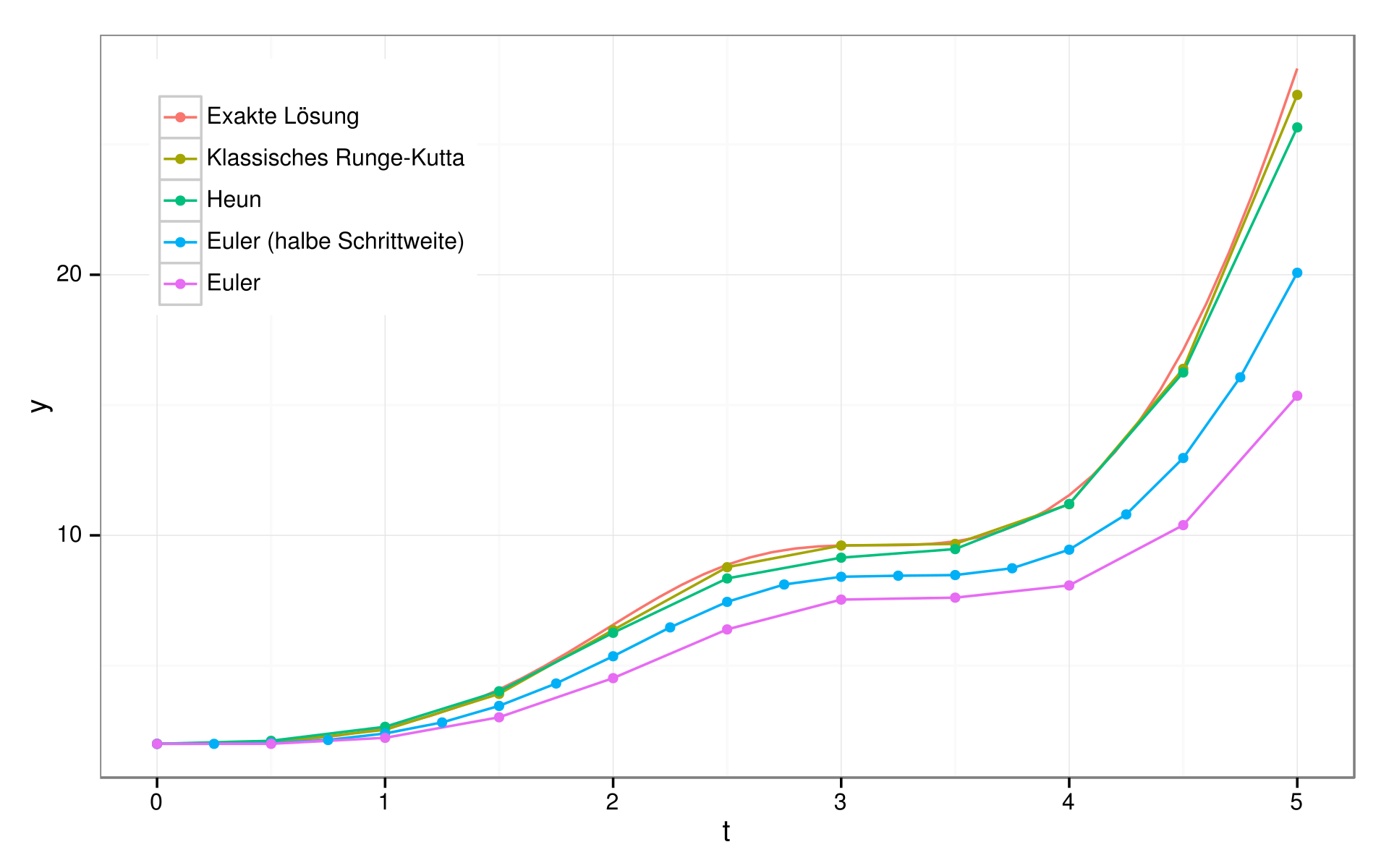
Comparison of Runge-Kutta with other methods for the solution of the ODE: \(y'=sin^2(t)*y\)
3.13 Boris algorithm
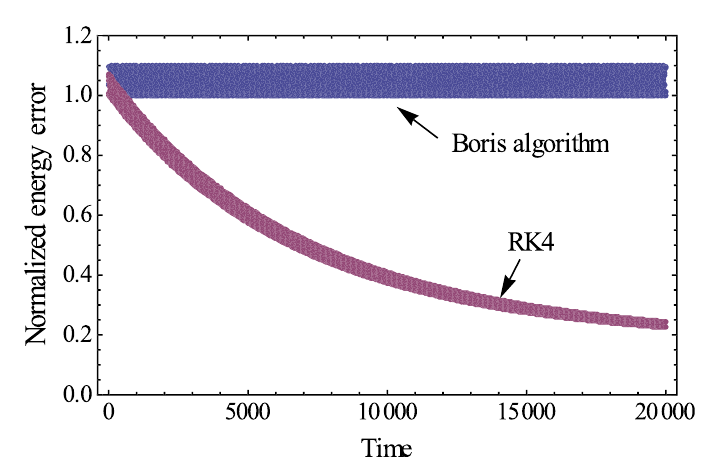
Comparison of energies of a charged particle moving in a given B-field, with its trajectory calculated using the RK4 and Boris algorithms (Qin et al. (2013))