Lecture 7: Fluid and MHD – Lecture
December 5, 2023
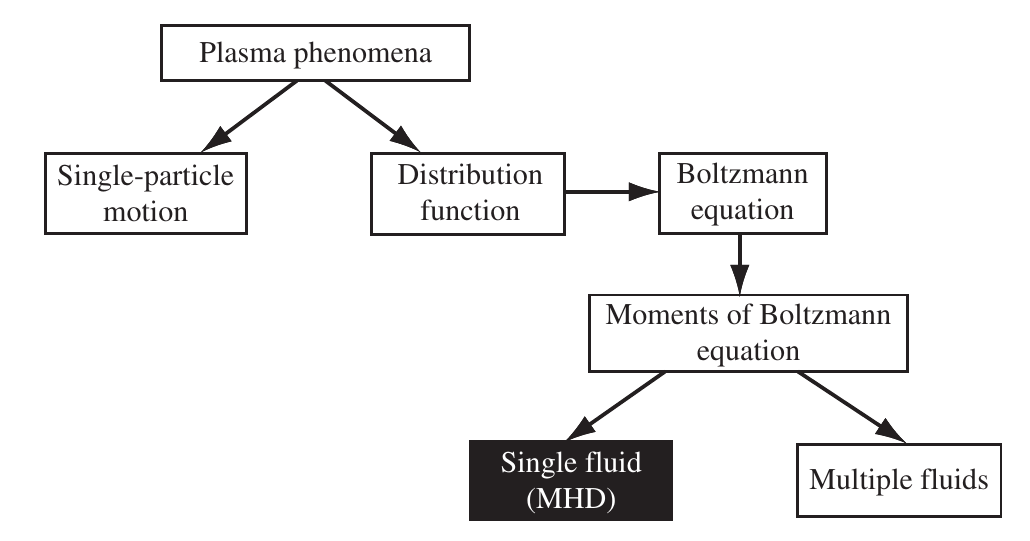
2.2 MHD plasma model
- Fluid description: it uses a few macroscopic quantities, averages of the distribution function (mean velocity, pressure/temperature). Valid for or near thermodynamic equilibrium.
![Hierarchy of plasma physics models]()
2.3 Validity of the MHD model
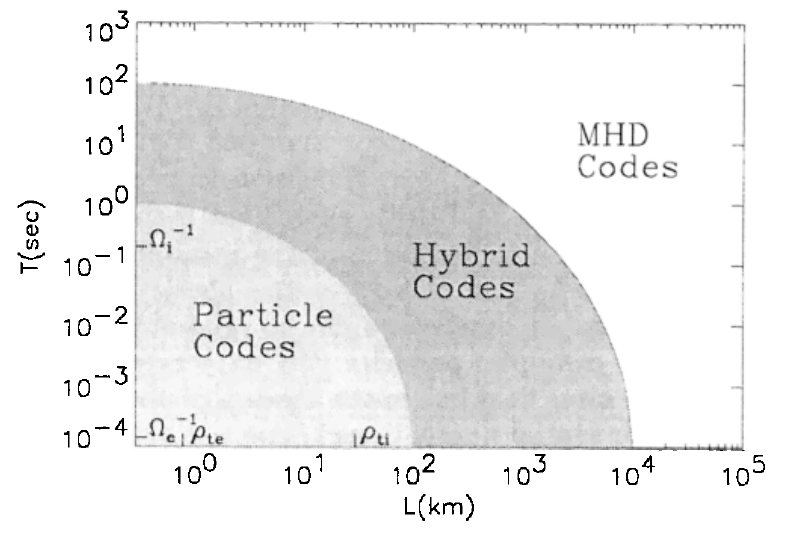
Range of validity of different plasma codes based on typical magnetospheric parameters: \(n=50cm^{-3}\), \(B=50 nT\), \(T_e=T_i=100 eV\) (Winske and Omidi (1996)).
3.1 Magnetohydrodynamics
Title text of https://xkcd.com/1851/: “Magnetohydrodynamics combines the intuitive nature of Maxwell’s equations with the easy solvability of the Navier-Stokes equations. It’s so straightforward physicists add”relativistic” or “quantum” just to keep it from getting boring”.
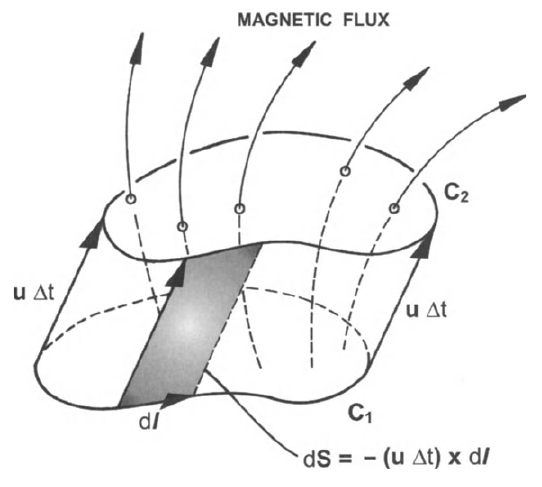
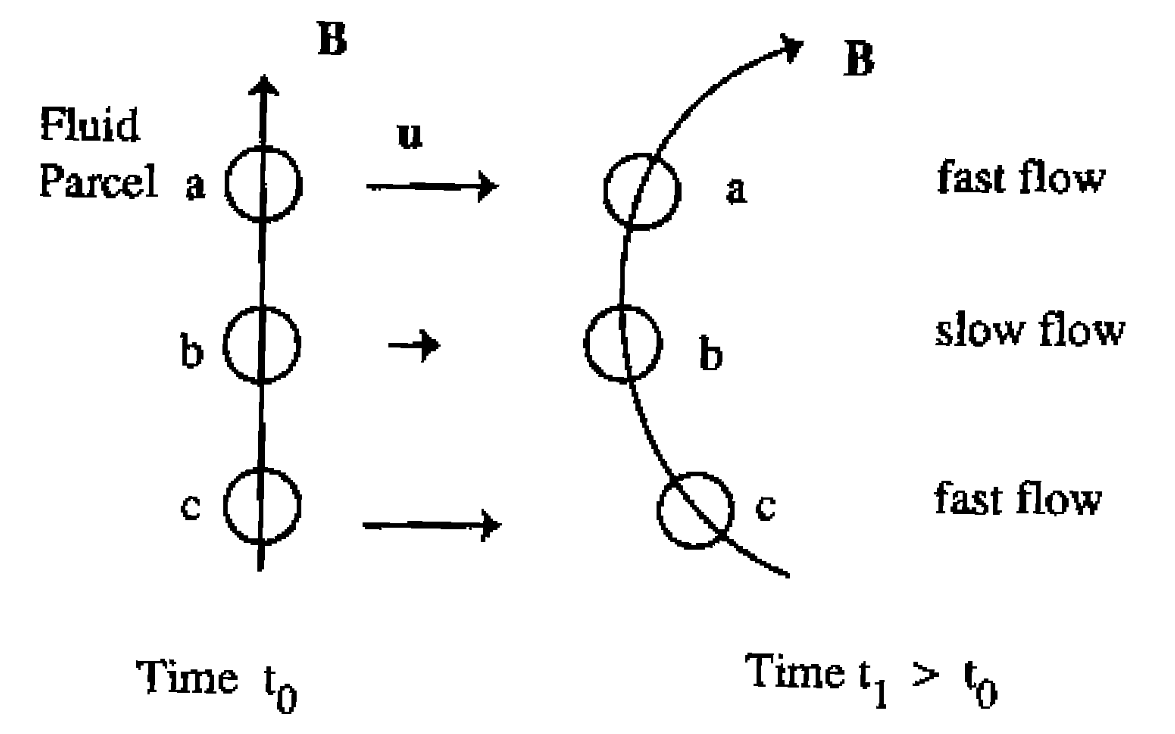
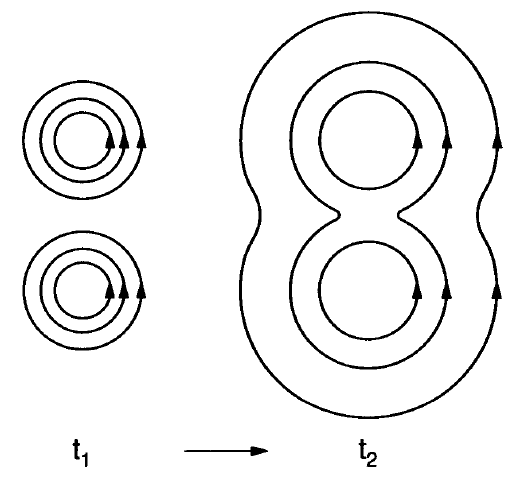
3.12 Frozen-in magnetic flux: The Alfvén theorem
- If convection dominates (diffusion negligible), \(R_m\gg 1\)
\[ \frac{\partial\vec{B}}{\partial t}=\nabla\times\left(\vec{V}\times\vec{B}\right) \;\;\text{or}\;\; \vec{E}+\vec{V}\times\vec{B}=0 \]
Alfvén’s theorem
\[ \frac{D\Phi}{Dt}=0 \;\;\text{or}\;\; \Phi=\int\vec{B}\cdot d\vec{S}=\text{constant} \]
3.13 Magnetic diffusion
- If diffusion dominates \(R_m\ll 1\) \[ \frac{\partial\vec{B}}{\partial t}=\frac{\eta}{\mu_0}\nabla^2\vec{B} \] A simple solution of the diffusion equation is \[ B = B_0{\rm exp}\left(\pm t/\tau_d\right), \qquad \mathrm{with} \qquad \tau_d=\mu L_B^2/\eta. \]
Magnetic diffusion (Baumjohann and Treumann (1997)).
4.4 Forward time centered space (FTCS) difference scheme
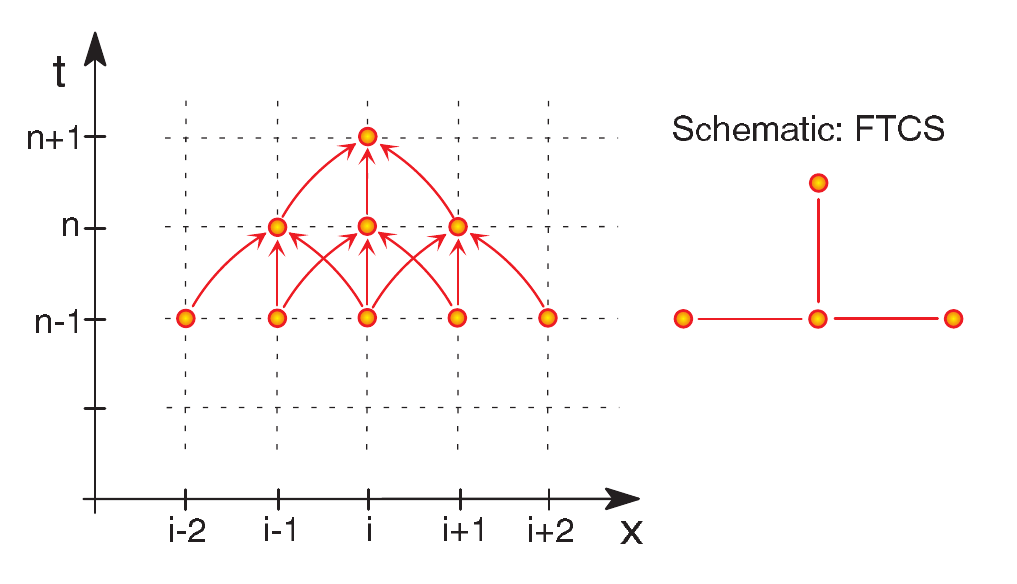
FTCS scheme.
4.6 Methods for diffusion equations: Crank-Nicholson
- An idea to change the small CFL timestep of the diffusion eq. with the previous discretization is the Crank-Nicholson scheme, second-order accurate in time.
- Implicit Crank-Nicholson is based on a mixture of spatial derivatives using time levels \(n\) and \(n+1\) \[ \frac{f_j^{n+1} - f_j^{n}}{\Delta t} = \frac{\alpha}{2}L_{xx}(f_{j}^n + f_{j}^{n+1}) \] or \[ \frac{u_j^{n+1} - u_j^{n}}{\Delta t} = \frac{\alpha}{2}\left(\frac{(u_{j+1}^{n+1} -2u_j^{n+1} + u_{j-1}^{n+1}) +(u_{j+1}^{n} -2u_j^{n} + u_{j-1}^{n}) }{(\Delta x)^2} \right) \qquad(3)\]
- This scheme is unconditionally stable.
Crank-Nicholson scheme. The lines shows the derivatives. Horizontaly goes space, vertially time.
4.7 Methods for diffusion equations: Others
4.10 Methods for convection equations
- Let us assume for simplicity \(V\) known and constant. This leads to the linear convection/advection equation: \[ \frac{\partial f}{\partial t} + V\frac{\partial f}{\partial x}=0 \] with solution \(f(x,t)=F(x-Vt)\), where \(F(x)=f(x,t=0)\).
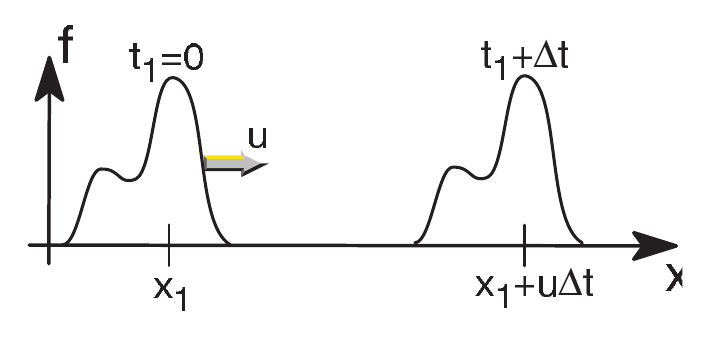
Solution of the linear convection equation, transport of the initial profile
4.11 Methods for convection equations: Upwind
- One the simplest first-order methods is the upwind scheme \[ \frac{f_{j}^{n+1} - f_{j}^{n}}{\Delta t} + V\frac{f_{j}^{n} - f_{j-1}^{n}}{\Delta x}=0 \] yielding the algebraic equation \[ f_j^{n+1} = (1-c)f_j^{n} + c f_{j-1}^{n} \]
- Stability requires \(c=V\Delta t/\Delta x \leq 1\) (CFL condition: information should travel at most one grid spacing in a single time step)
Upwind scheme
4.12 Methods for convection equations: Leapfrog
- One of the simplest 2nd order schemes for convection eqs is Leapfrog: \[ \frac{f_j^{n+1} - f_j^{n-1}}{2 \Delta t} + \frac{V}{2 \Delta x}(f_{j+1}^{n} - f_{j-1}^{n})=0 \] yielding the algebraic eq: \[ f_j^{n+1} = f_j^{n-1} - c (f_{j+1}^{n} - f_{j-1}^{n}) \] with \(c=V\Delta t/\Delta x\).
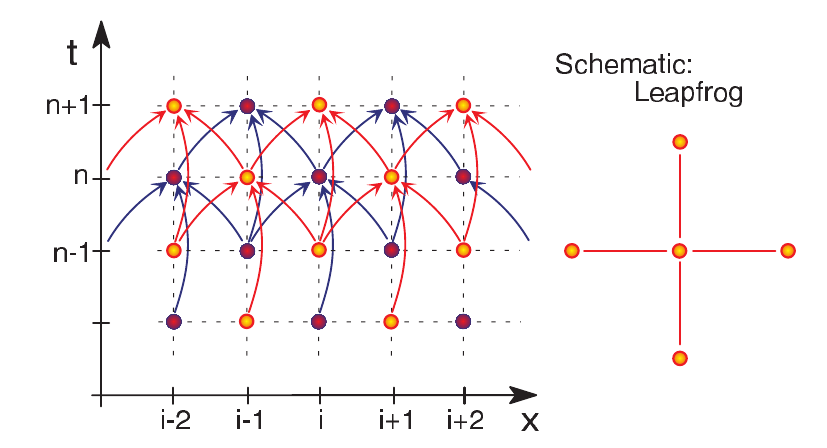
Leapfrog scheme
4.17 Methods for convection equations: Others
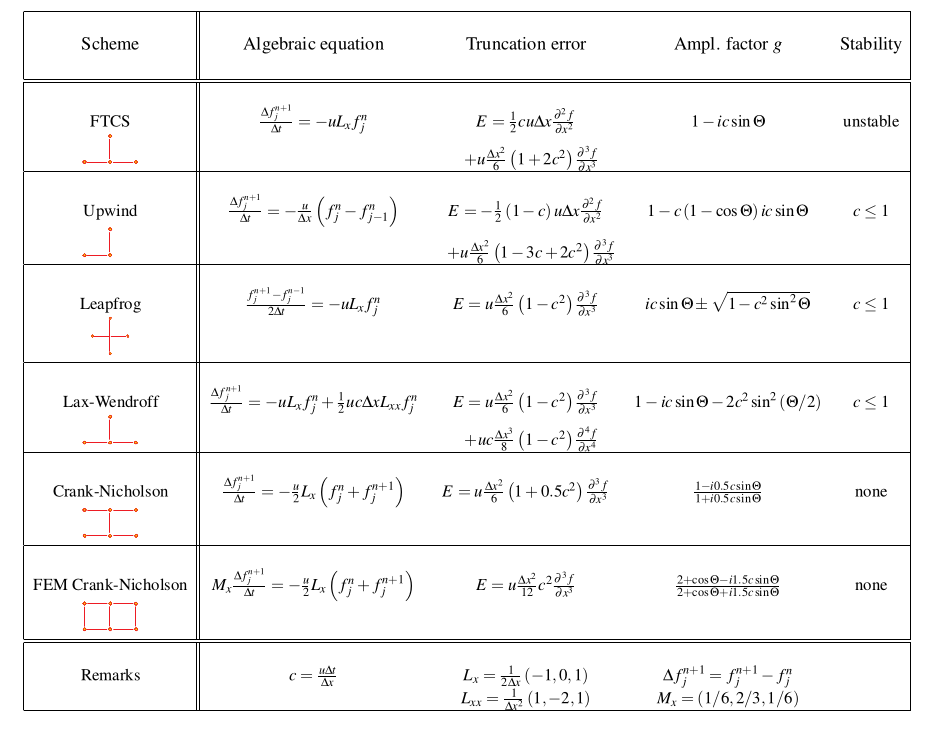
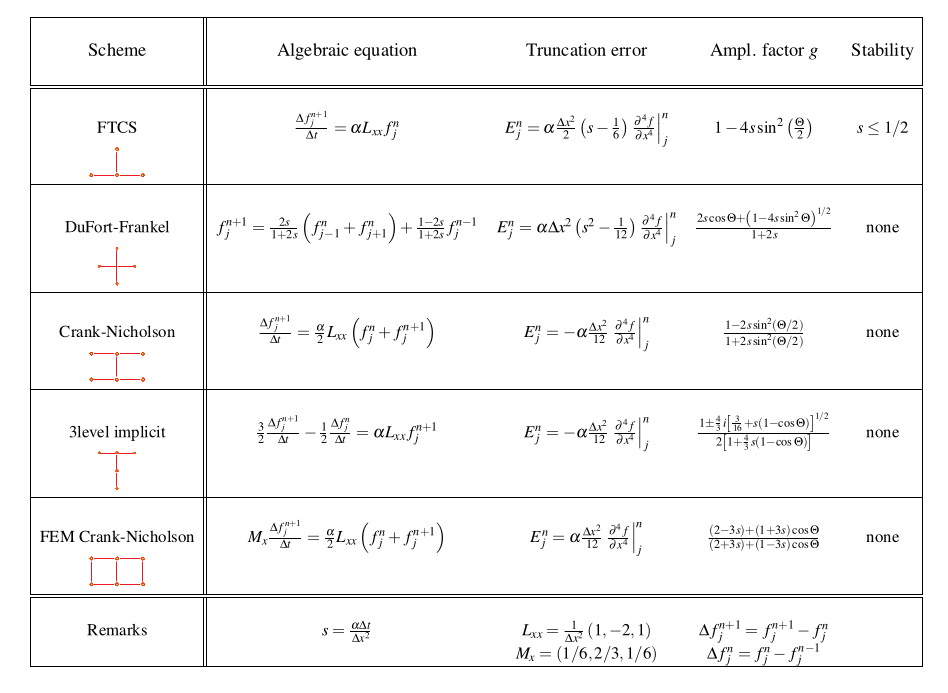
4.21 Methods for transport equations: Summary
Dufort-Frankel scheme.
4.22 Non-linear transport equations
- The prototype is Burgers equation: \[ \frac{\partial V}{\partial t} + V\frac{\partial V}{\partial x} - \nu \frac{\partial^2 V}{\partial x^2} =0 \]
- Nonlinear term is \(V\frac{\partial V}{\partial x}\), and the term including \(\nu\) is the viscous term.
- The conservative form is written with the second term as \(\partial F/\partial x\), with \(F=V^2/2\).
- Wave steepening and breaking: wave speed depends on the amplitude or other parameters.
- Examples: sound waves (depending on the temperature/pressure), shock waves (amplitude), tsunamis (amplitude depending on the depth of the water).
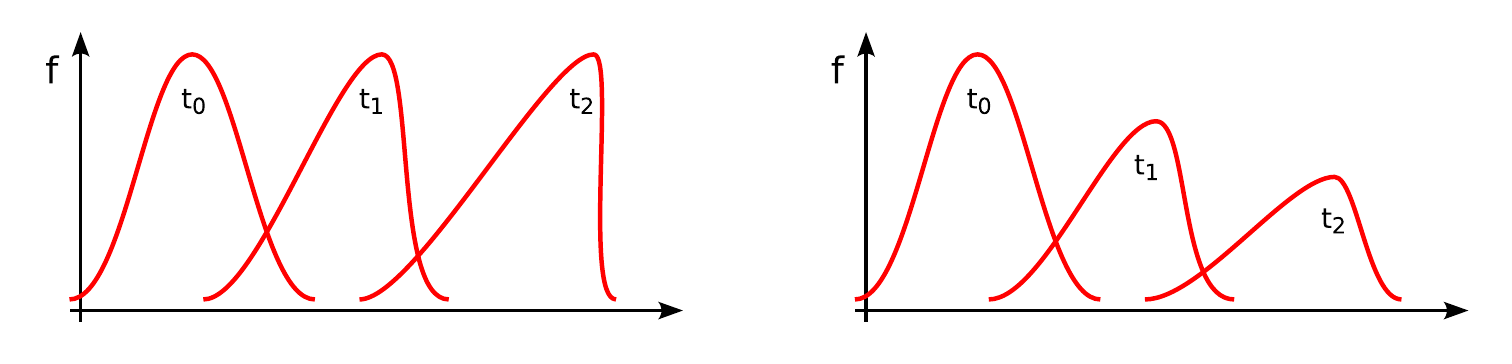
Solution of the Burgers equation. Left: Inviscid case (\(\nu=0\)). Right: Viscous medium
5.5 Methods for diffusion equations: Dufort-Frankel
- The Dufort-Frankel scheme is based on a modification of the FTCS scheme for the diffusion (parabolic) equation by using centered difference in time and the middle term in the Laplacian (\(2f_{j}^n\)) split into two time levels: \[ \frac{f_j^{n+1} - f_j^{n-1}}{2\Delta t} = \frac{\alpha}{\Delta x^2} L_{xx} f_j^n=\frac{\alpha}{\Delta x^2}(f_{j-1}^n - (f_{j}^{n-1} + f_{j}^{n+1}) + f_{j+1}^n ) \] and rearranging: \[ f_j^{n+1} = \frac{2s}{1+2s}(f_{j-1}^n + f_{j+1}^n ) + \frac{1-2s}{1+2s}f_{j}^{n-1} \]
- This scheme is unconditionally stable.
![Dufort-Frankel scheme]()
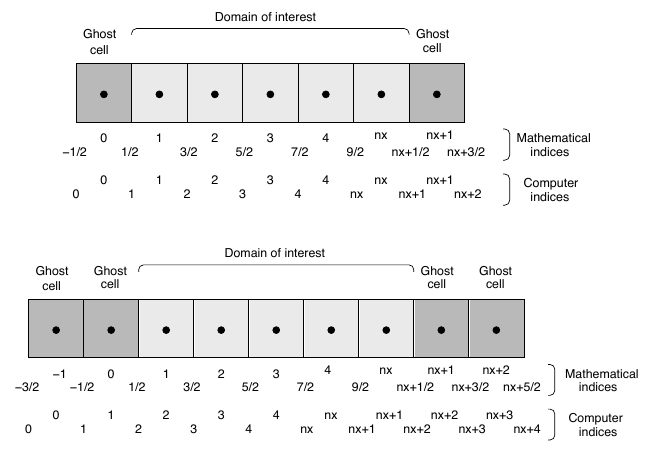
5.17 Ghost cells
- Example for a flux-conserving algorithm with three point stencil (top) and 4-5 point stencil (bottom).