Lecture 11: Smooth Particle Hydrodynamics – Lecture + Hands-on
January 23, 2024
2.2 Kernel function
- Kernel function describes a smooth quantity by weighting macro-particles
- Similar to PIC weighting/smooth function of macro-particles \[ f(\vec{x}) = \int_{\Omega} f(\vec{y}) W(\vec{x} - \vec{y}, h) d\vec{y} \]
- \(h\) is the smoothing length
- for \(h \rightarrow\) 0, \(W\) approach delta function
- for \(|\vec{r}| > K_{max} h\), we define \(W(\vec{r}) = 0\)
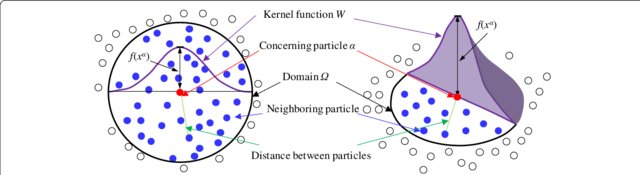
SPH kernel function (DOI).
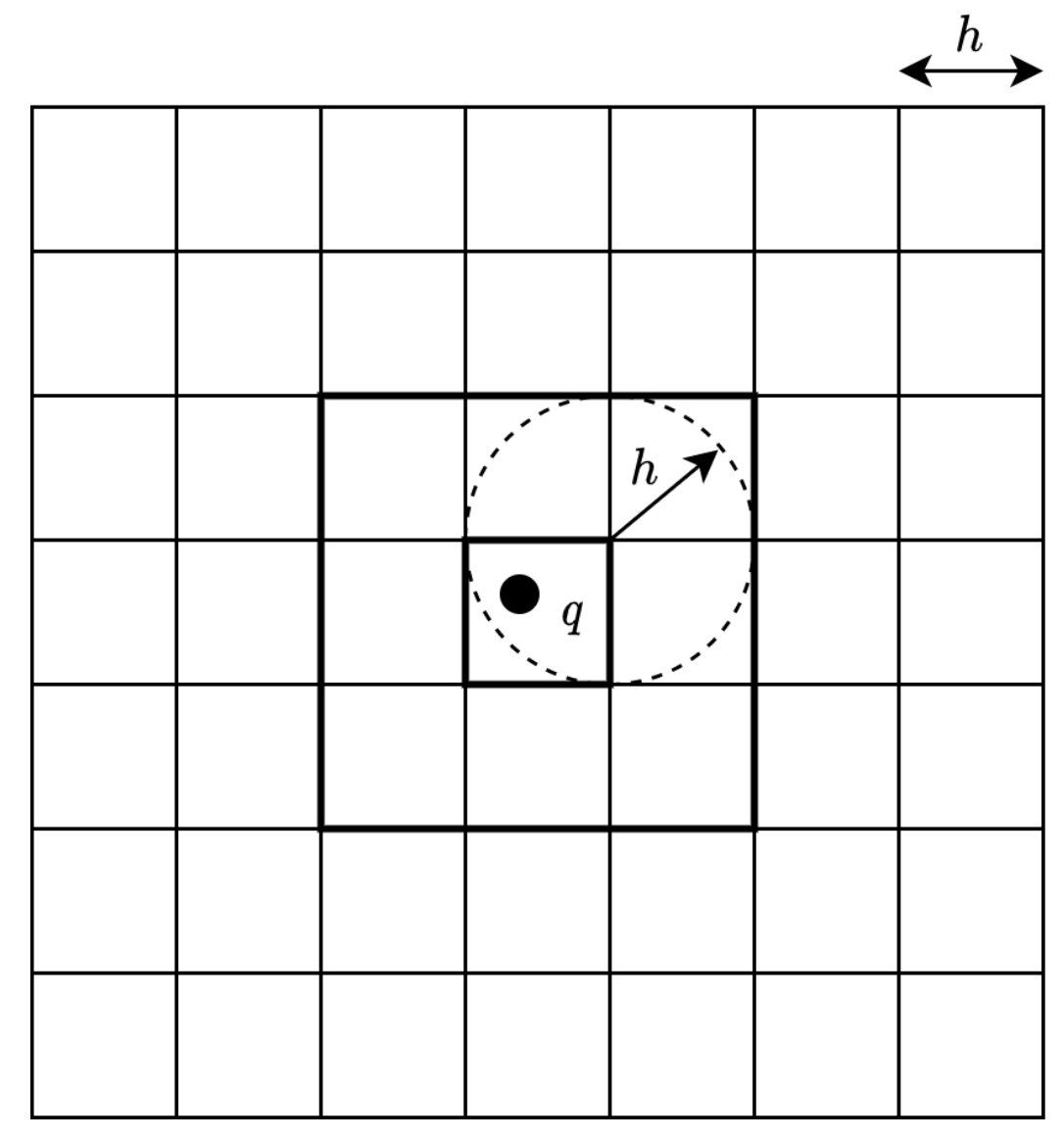
4.3 How it works:
- Particle are devided into cells of an uniform grid
- The grid size is the particle radius (for various particles radii, the largest must be used)
- Neighbors are always the particles in surrounding boxes
- Works well for constant particle radii
4.4 NNPS for variable radii
- When particles can change their radii, some cells contain only a few particles while other really many
- Various data structures were proposed to efficiently handle particle neighbors
- Options:
- Octree - Widely used; divide the 3D grid cell into 8 octants into subgrids untill the subgrid has less than specified number of particles; well for parallelization; manipulation with subgrids not so easy.
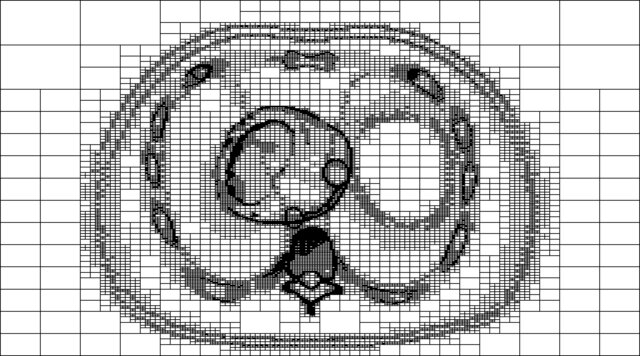
Octree algorithm DOI.
4.5 Linked list
- Mapping each cell to an ID which is mapped into a head array of particles-
- The head array stores the first particle of that cell
- There is second array that maps the next particle;
- Better cache performance, but needs to allocate large array.
Linked list (DOI)
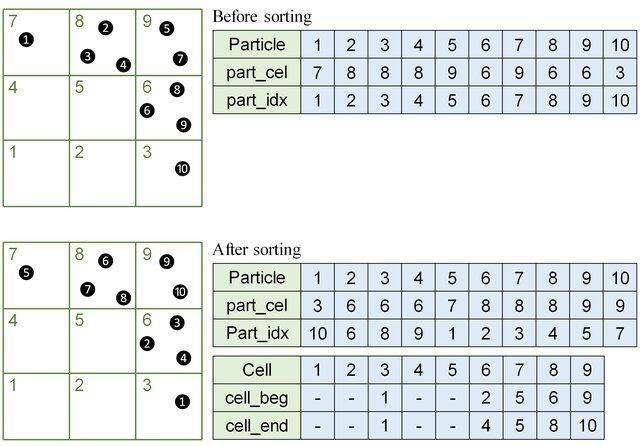
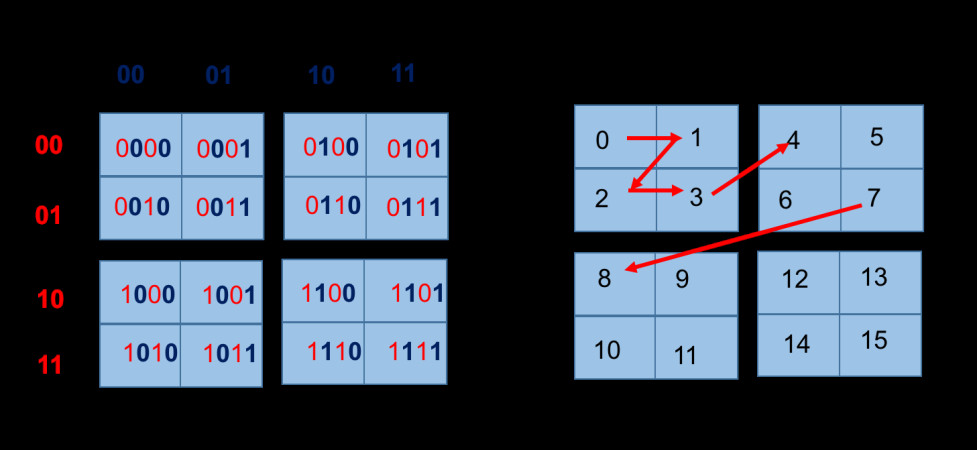
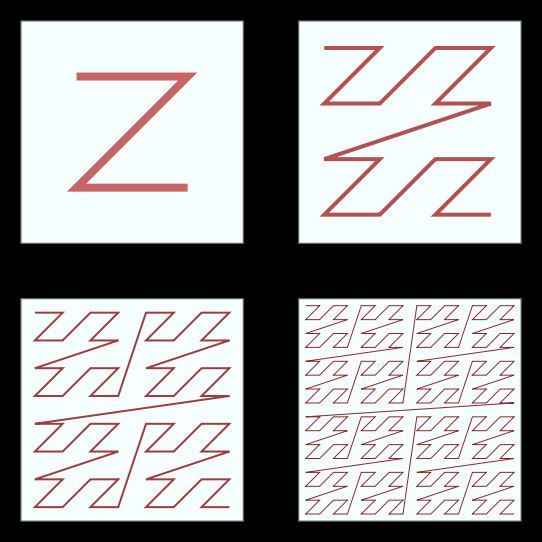
4.6 Z-Order Space Filling Curve
- Create a spatial order of surrounding particles;
- Sorting particles order based on their localization;
- This way close particles in space are close in the list.
5.3 Simulations of Galaxies
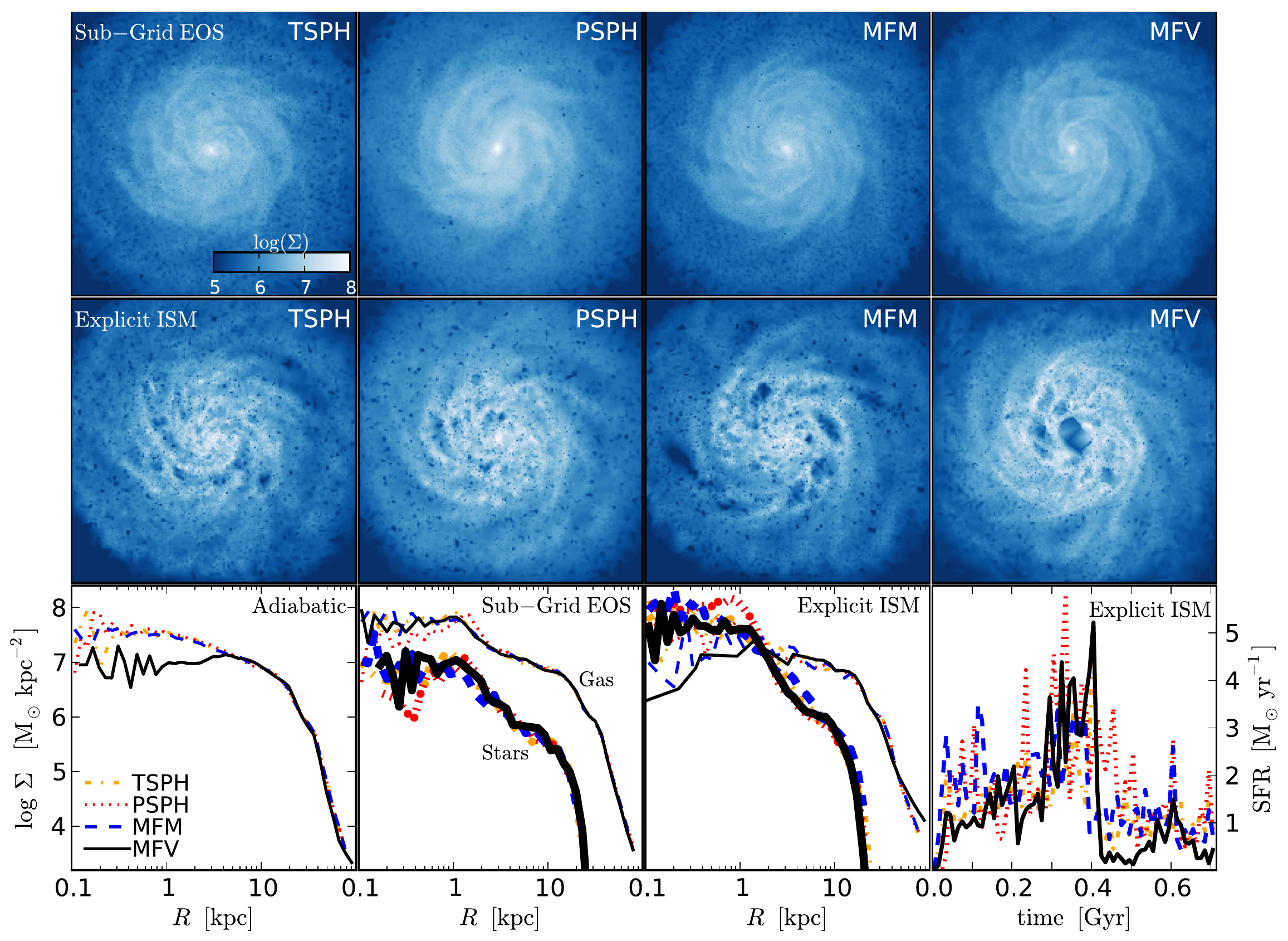
Hopkins 2015 – Traditional SPH (TSPH), Modern SPH (PSPH), Mesh-less Finite Mass (MSM), and Mesh-less Finite Volume (MFV).
5.4 Star formation
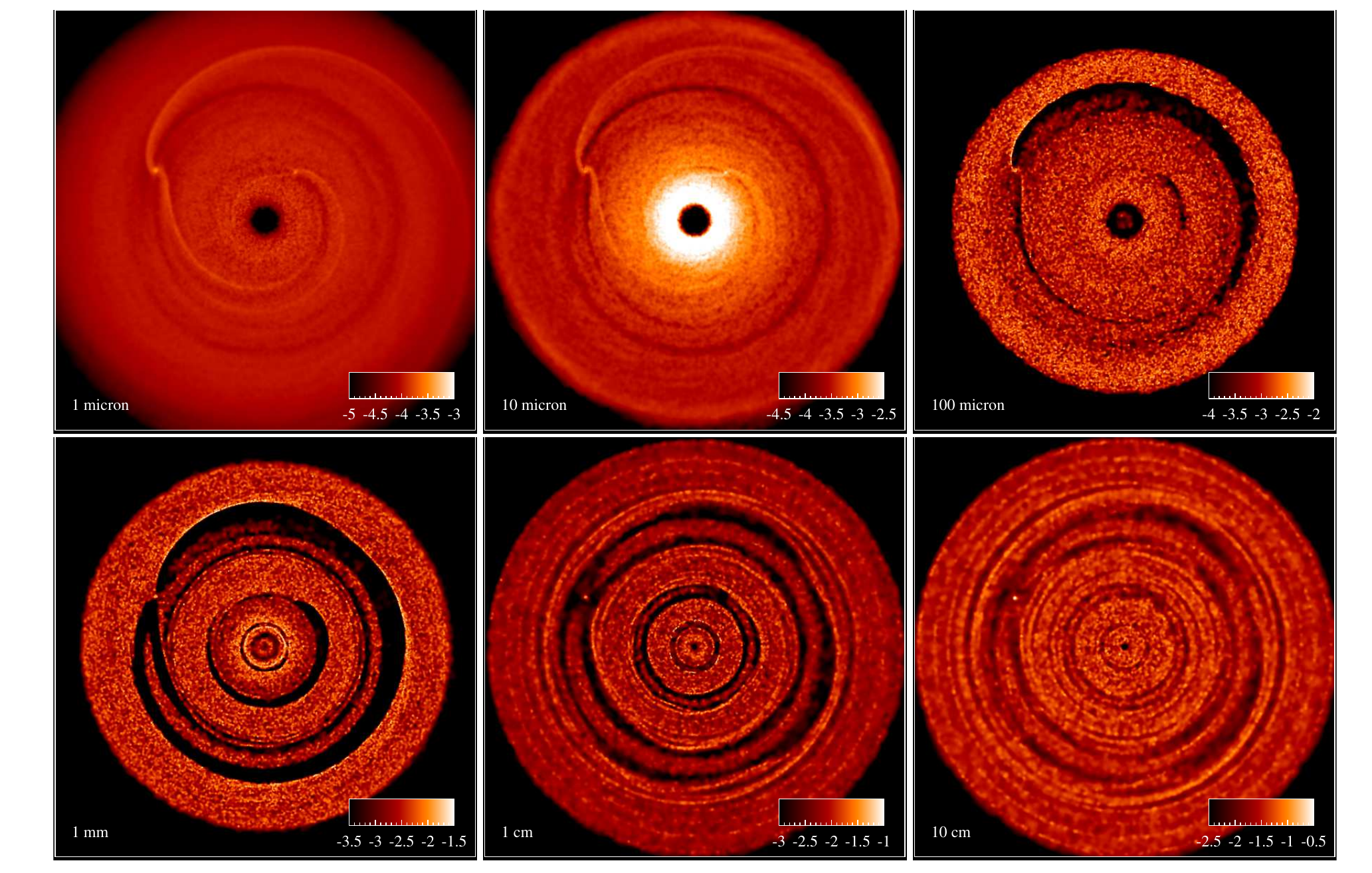
5.5 Planet formation
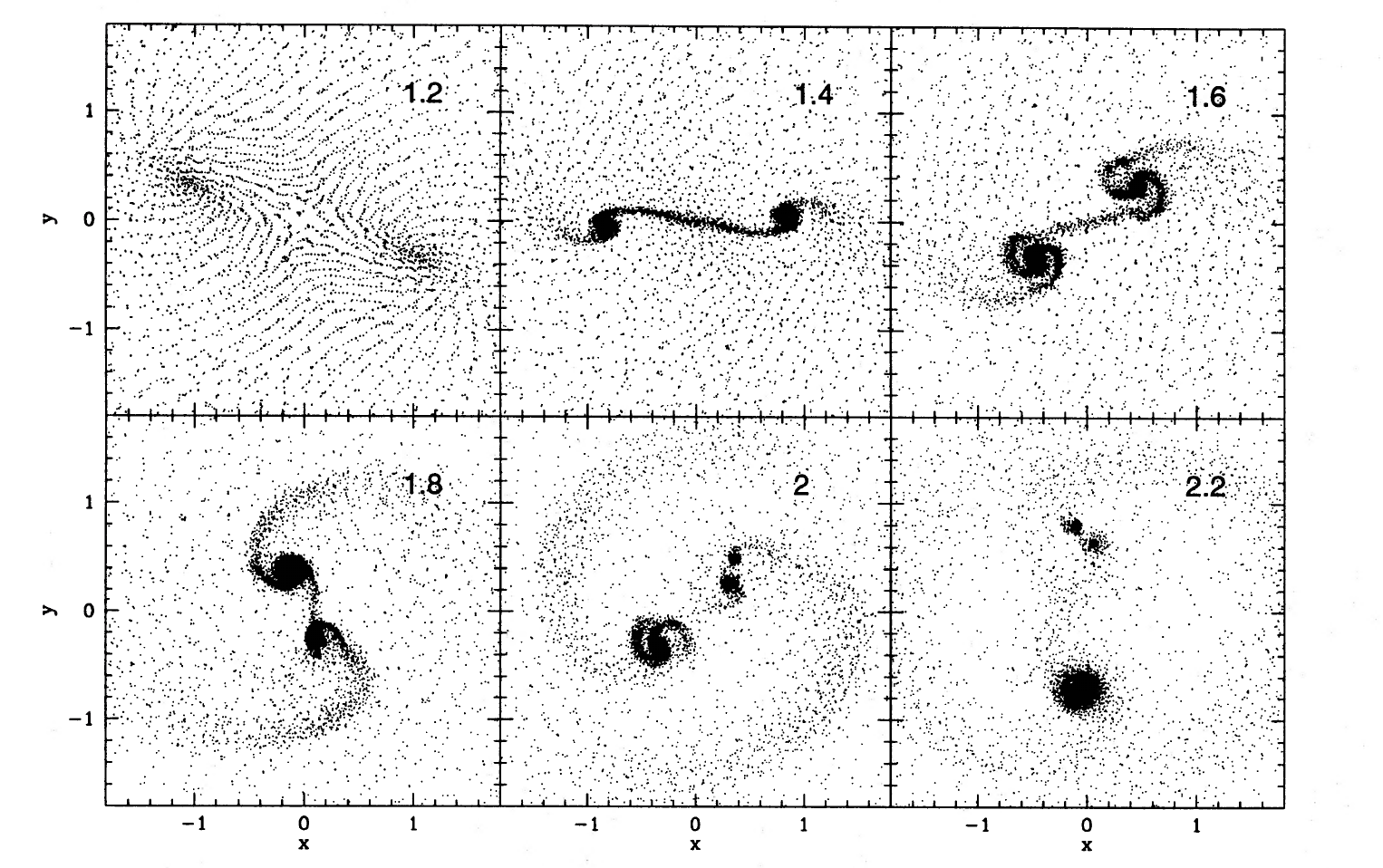
5.6 Moon formation
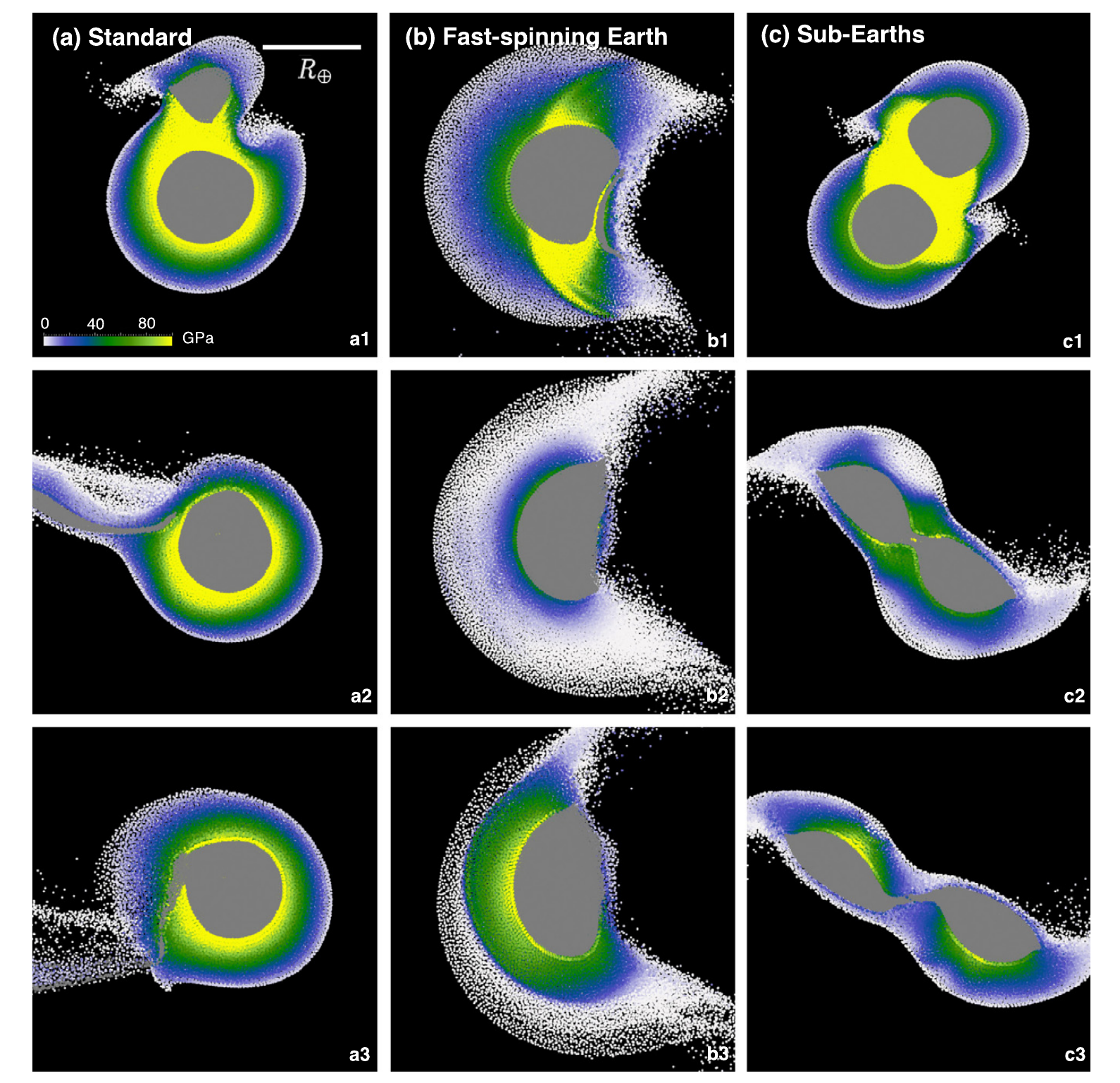
Nakajima and Stevenson (2015) (a) standard: a Mars-sized impactor hits the proto-Earth, (b) fast-spinning Earth: a small impactor hits a rapidly rotating proto-Earth, and (c) sub-Earths: two half Earth-sized planets collide.