Lecture 13: Eulerial Vlasov approach and Vlasov dispersion solvers – Lecture
February 6, 2025
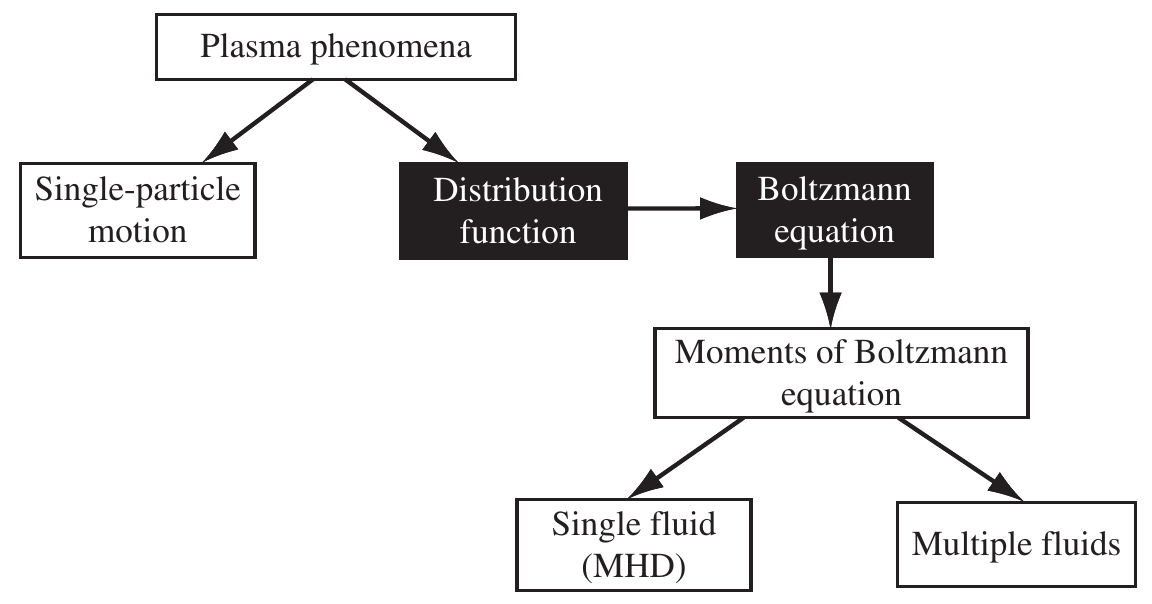
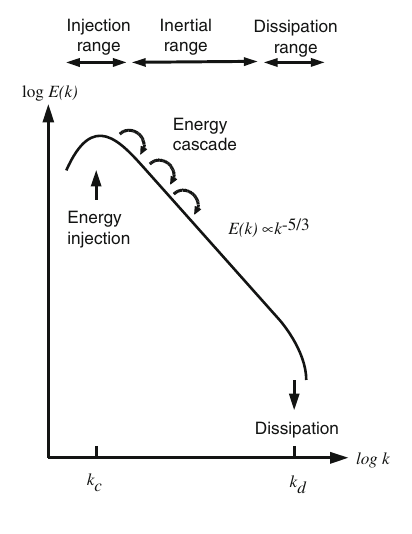
2.1 Hierarchy of plasma physics models
- Kinetic description: microscopic properties. Fundamental variable: velocity distribution function \(f\).
- Fluid description: it uses a few macroscopic quantities, averages of the distribution function (mean velocity, pressure/temperature). Valid for or near thermodynamic equilibrium.
![Hierarchy of plasma physics models]()
2.2 Vlasov equation
Liouville’s theorem: in absence of collisions, \(f\) is invariant along the trajectories in the 6D phase space.
\(\rightarrow\) Conservation of \(f(\vec{x},\vec{v},t)\) in phase space: \(Df/Dt=0\)
\(Df/Dt=0\) is called Vlasov equation considering:
- Convective derivative: \(D/Dt = \partial/\partial t + \vec{v}\cdot\partial/\partial\vec{x} + \vec{a}\cdot\partial/\partial\vec{v}\)
- Lorentz force: \(\vec{a}=\frac{q}{m}\left(\vec{E}+\vec{v}\times\vec{B}\right)\)
\[ \frac{Df}{Dt}=\left[\frac{\partial}{\partial t} + \vec{v}\cdot\frac{\partial}{\partial \vec{x}}+\frac{q_{\alpha}}{m_{\alpha}}\left(\vec{E}+\vec{v}\times\vec{B}\right)\cdot\frac{\partial}{\partial \vec{v}}\right]f_{\alpha}=0 \]
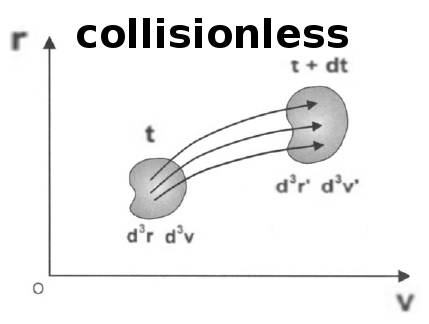
Conservation of the distribution function \(f\) (Bittencourt (2004)).
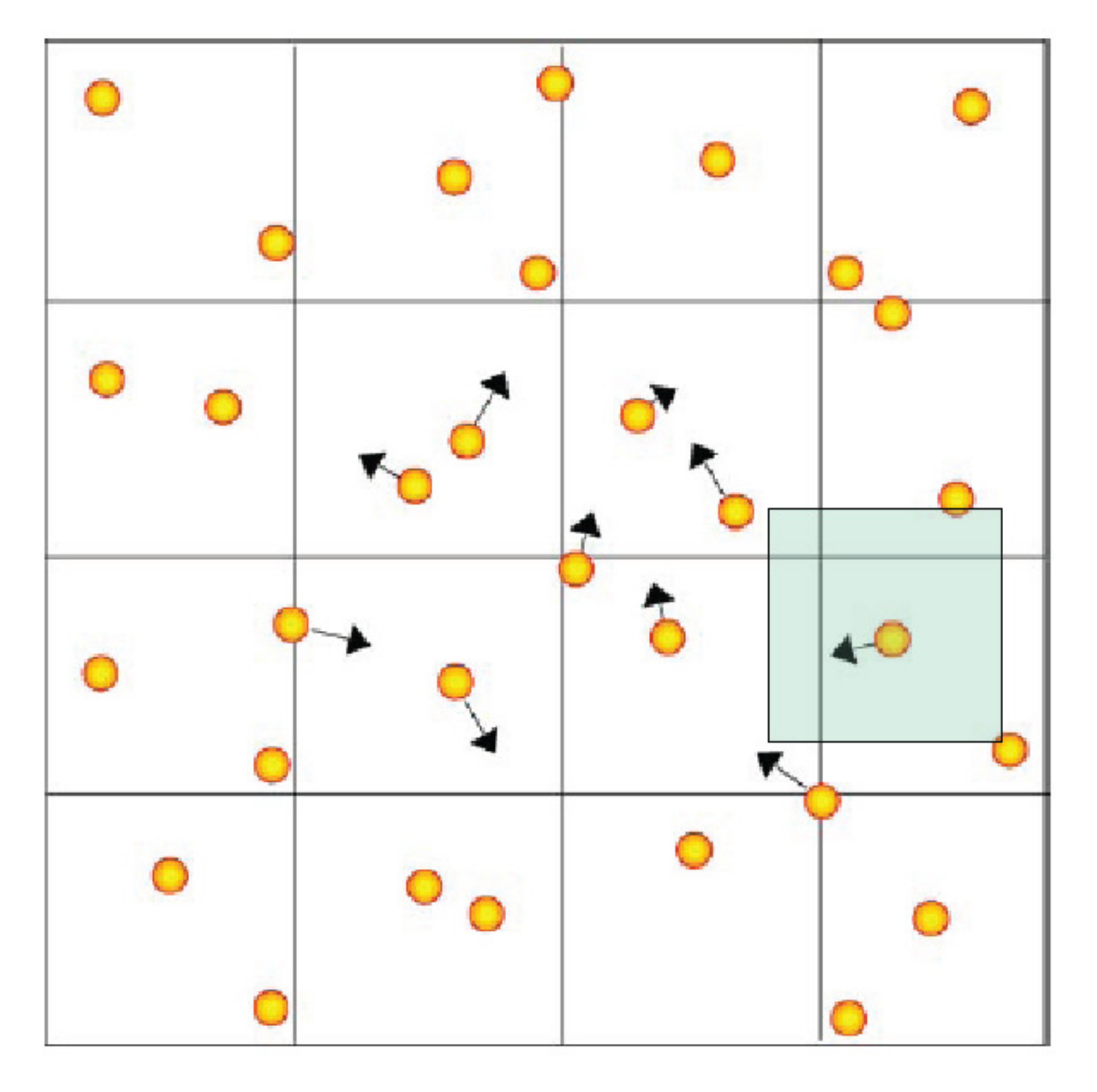
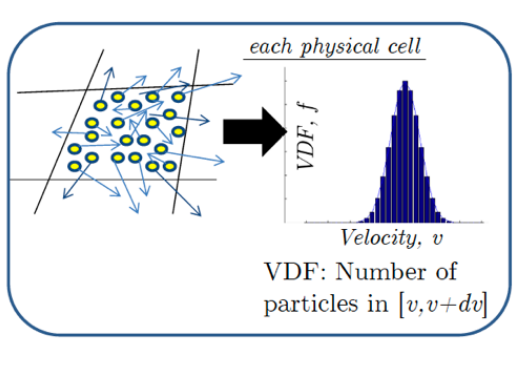
2.5 Distribution functions in PIC
2.6 Vlasov vs PIC
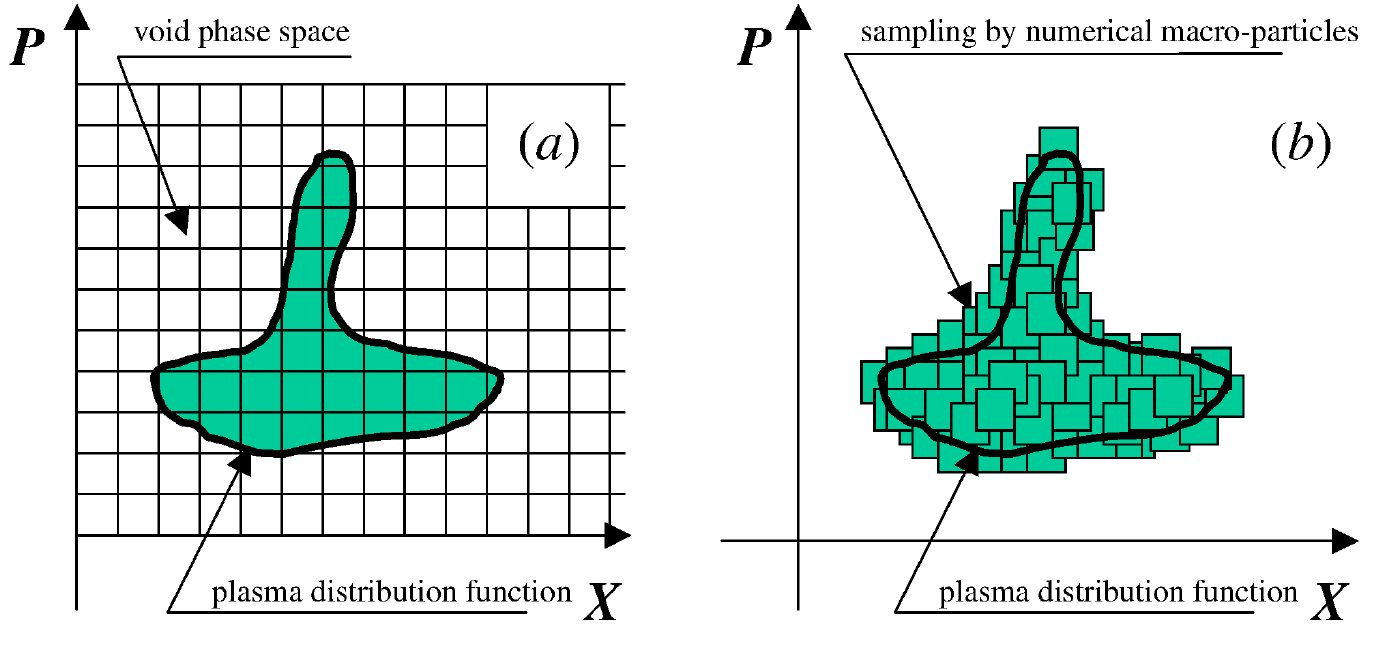
Phase space representation with PIC and Vlasov methods (Pukhov (2016)).
3.9 Splitting scheme: Shift and interpolation
4.2 Bump-on-Tail instability
- Initial function: \[ f_e=(1+\alpha\cos(kx))\left[(n_p/\sqrt{2\pi})\exp(-v^2/2)\right.\\ + \left.(n_b/\sqrt{2\pi})\exp(-(v-v_b)^2/(2v_t^2)\right]\nonumber \]
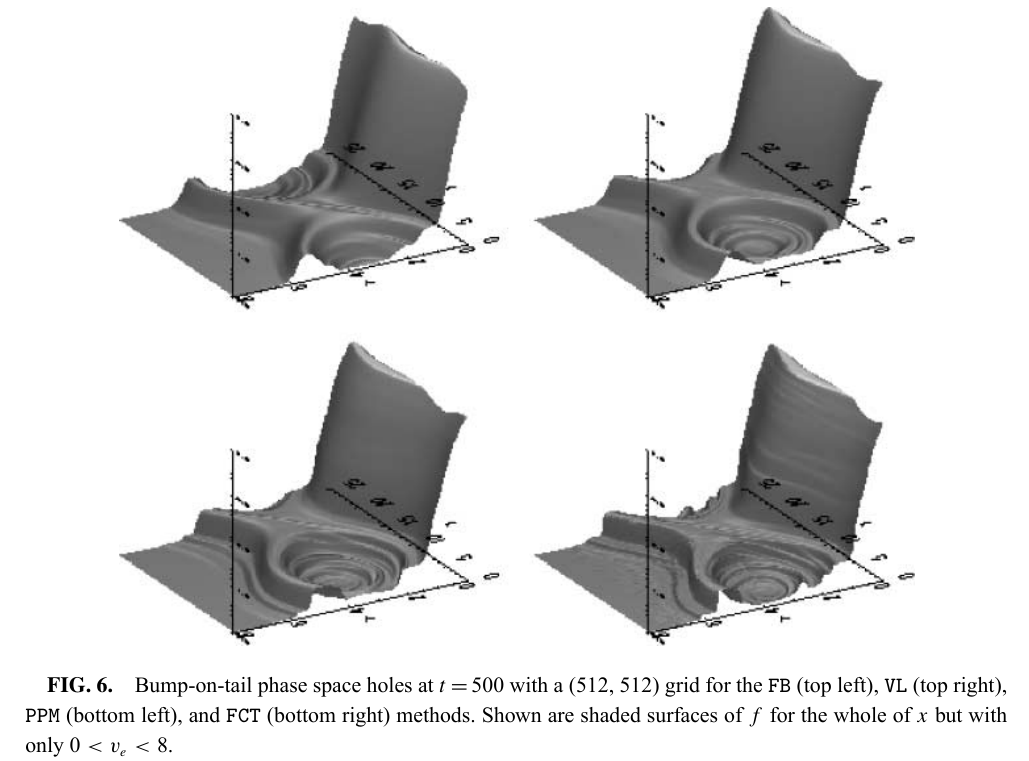
(Arber and Vann (2002)).
4.3 Two-stream instability
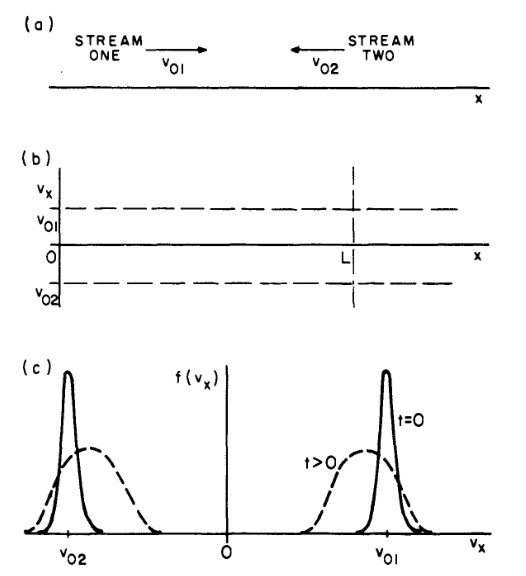
Setup of the two-stream instability (Birdsall and Langdon (1991)).
4.5 Two-stream instability
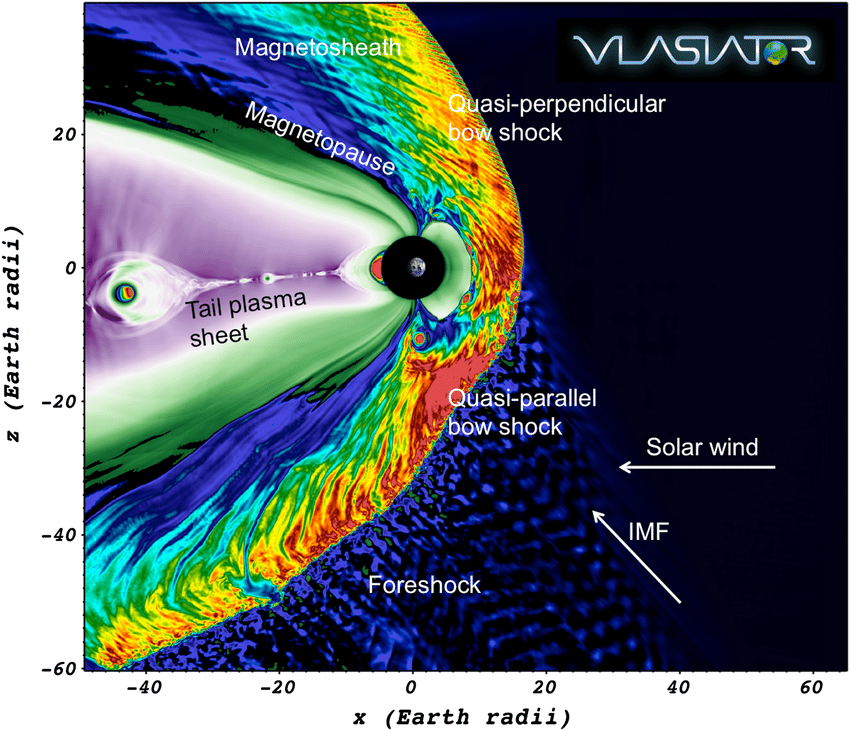
4.6 Earth’s magnetosphere
Vlasov methods in space physics and astrophysics, Palmroth et al. (2018)
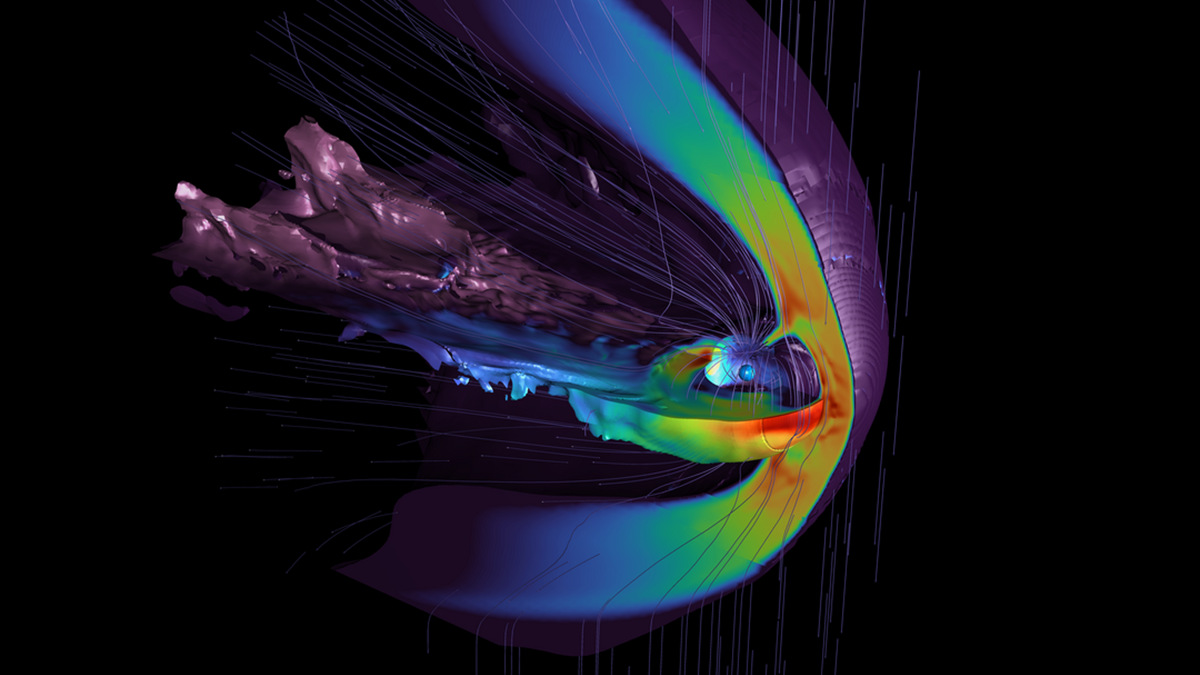
4.7 Earth’s magnetosphere
Ganse et al. (2023)
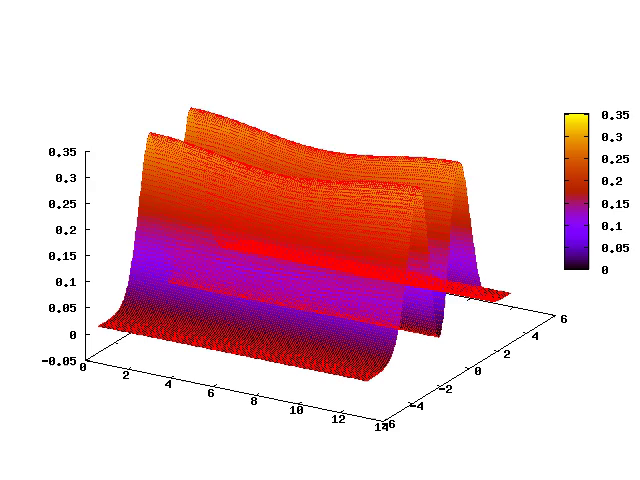
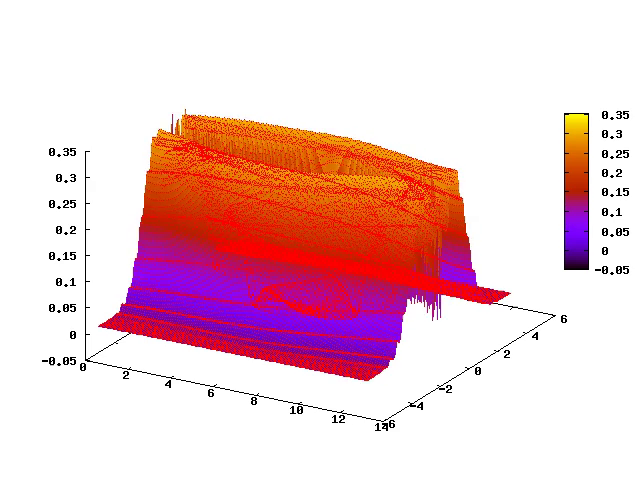
5.4 Recurrence
- Due to the factor \(\cos(k(x_i-jt\Delta v))\), the numerical density \(n_e(x_i,t)\) is periodic in time, with recurrence time: \[
T_R=\frac{2\pi}{k \Delta v}
\]
![Recurrence: density evolution for the free streaming case (Pohn, Shoucri, and Kamelander (2005))]()
5.5 Recurrence in linear Landau damping
- Initial function: \[ f_e= \frac{(1+\alpha\cos(kx))}{\sqrt{2\pi}}\exp(-\frac{v_e^2}{2}) \]
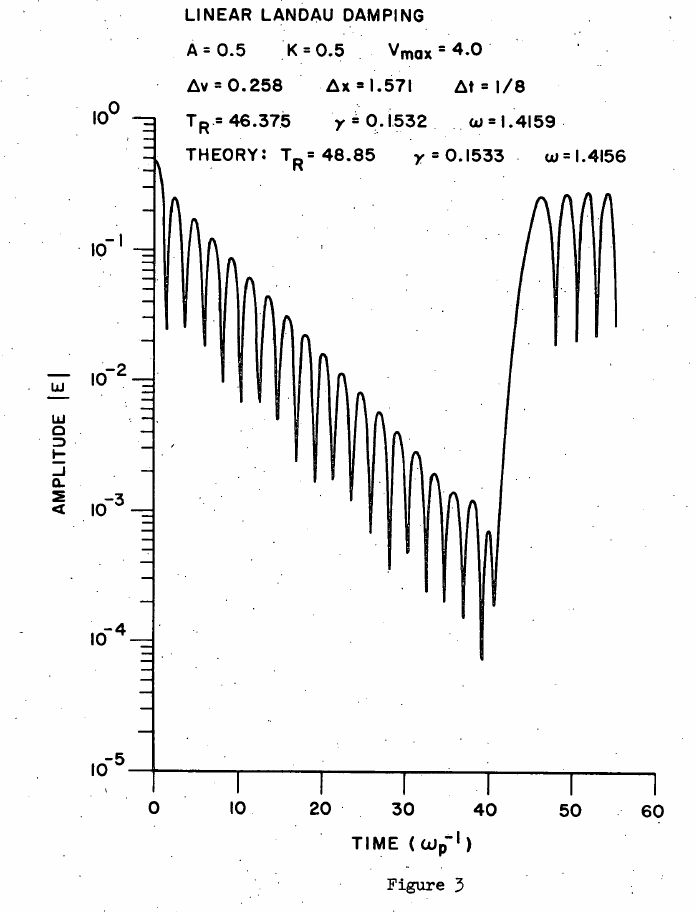
(Cheng and Knorr (1976)).
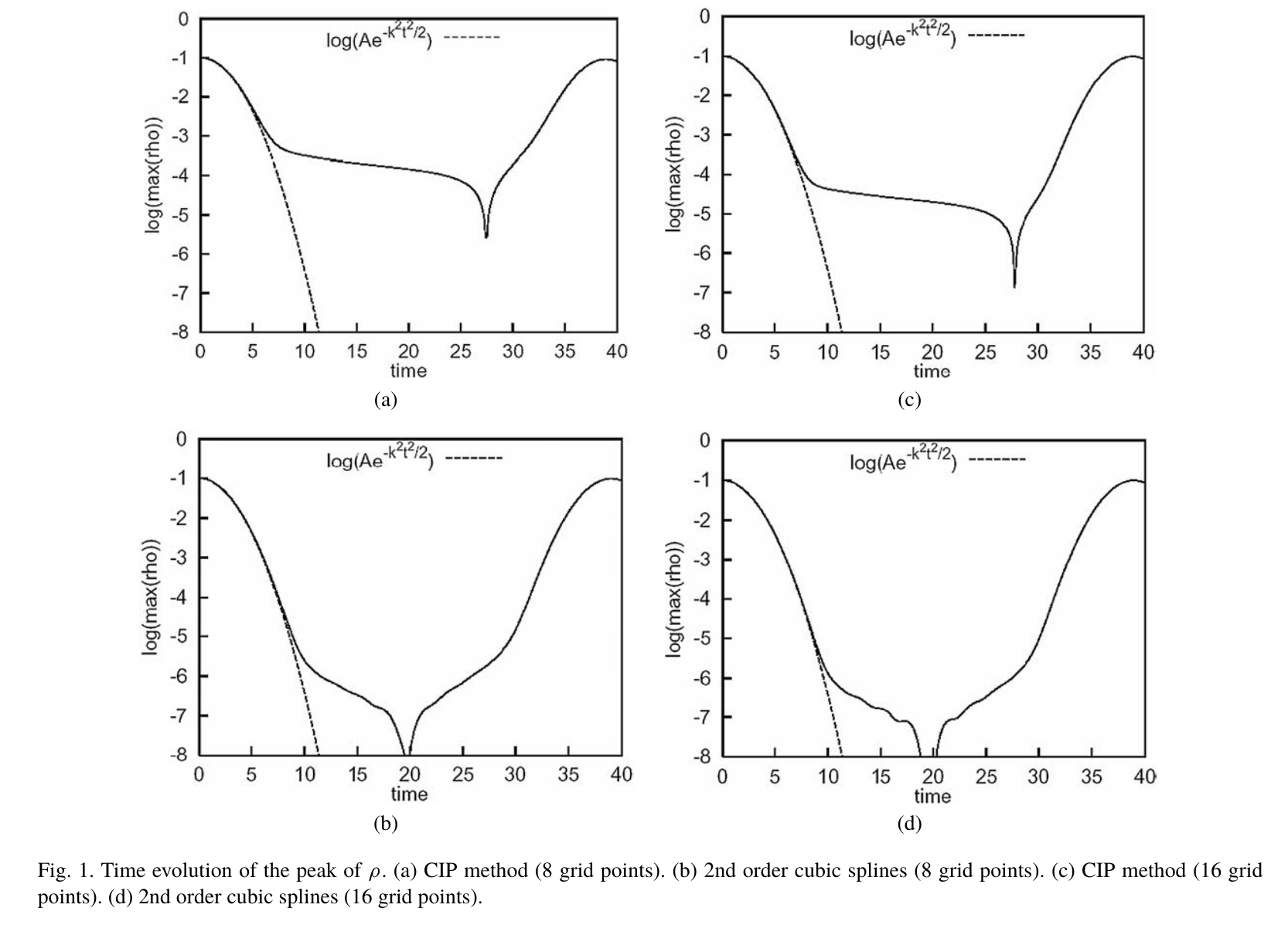
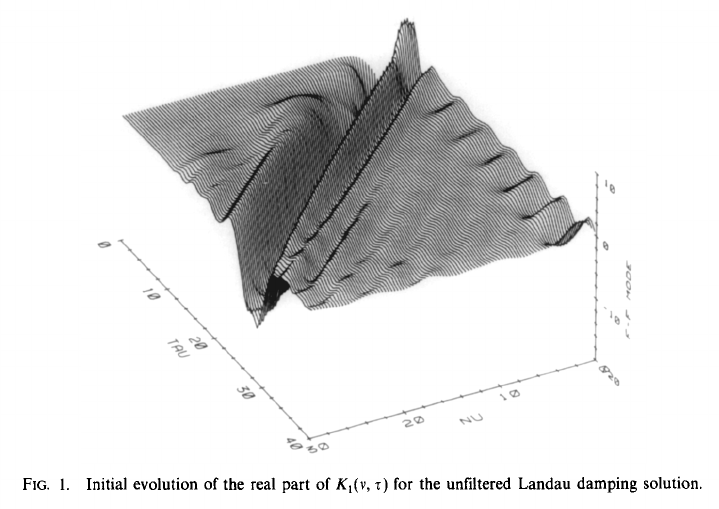
5.8 Filamentation for the non-Linear Landau damping
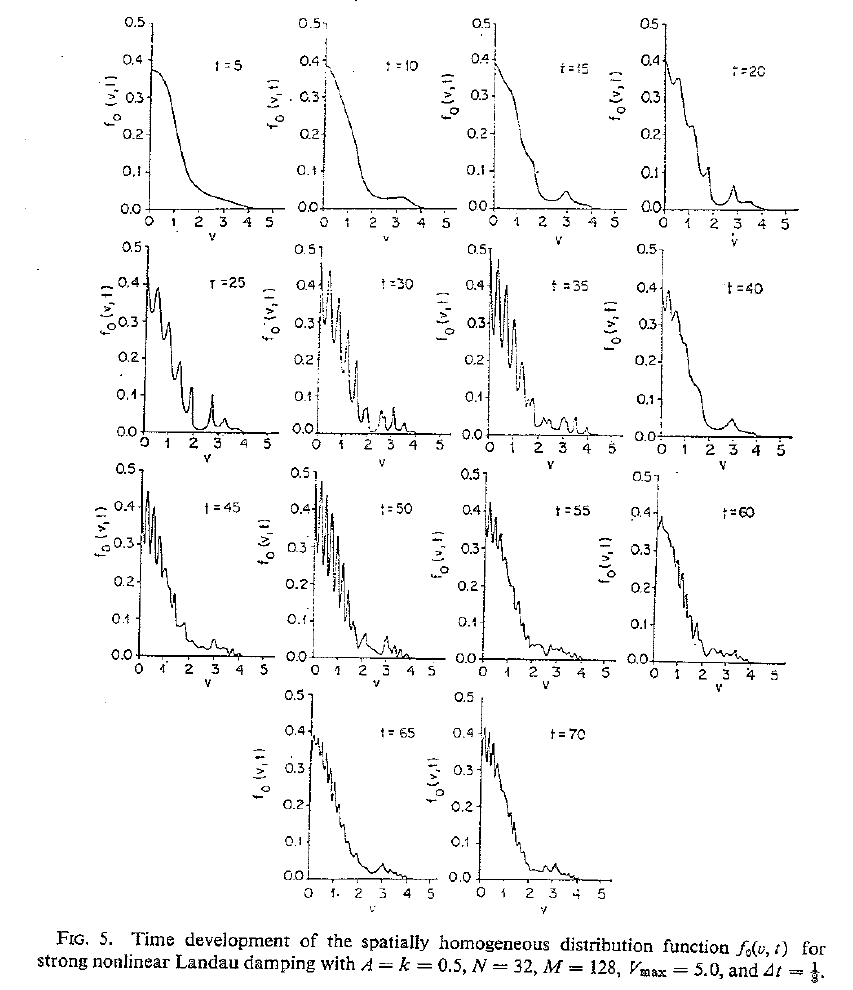
(Cheng and Knorr (1976))
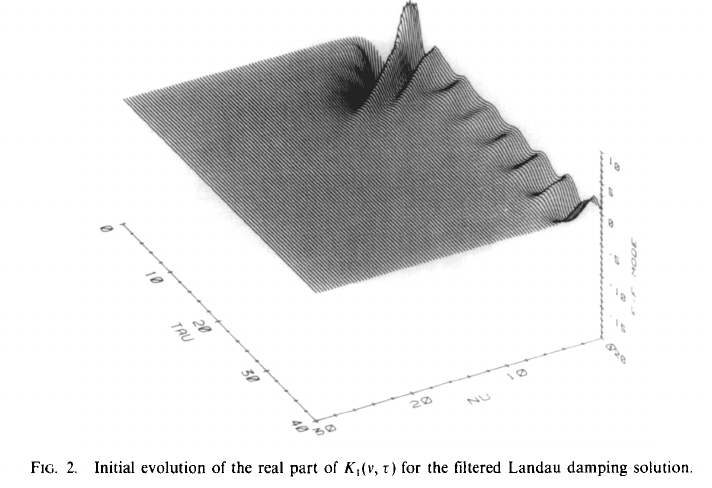
5.9 Filamentation
- Filtering \(f\) with a Gaussian distribution. Comparison for a Landau damping problem (Klimas (1987)).
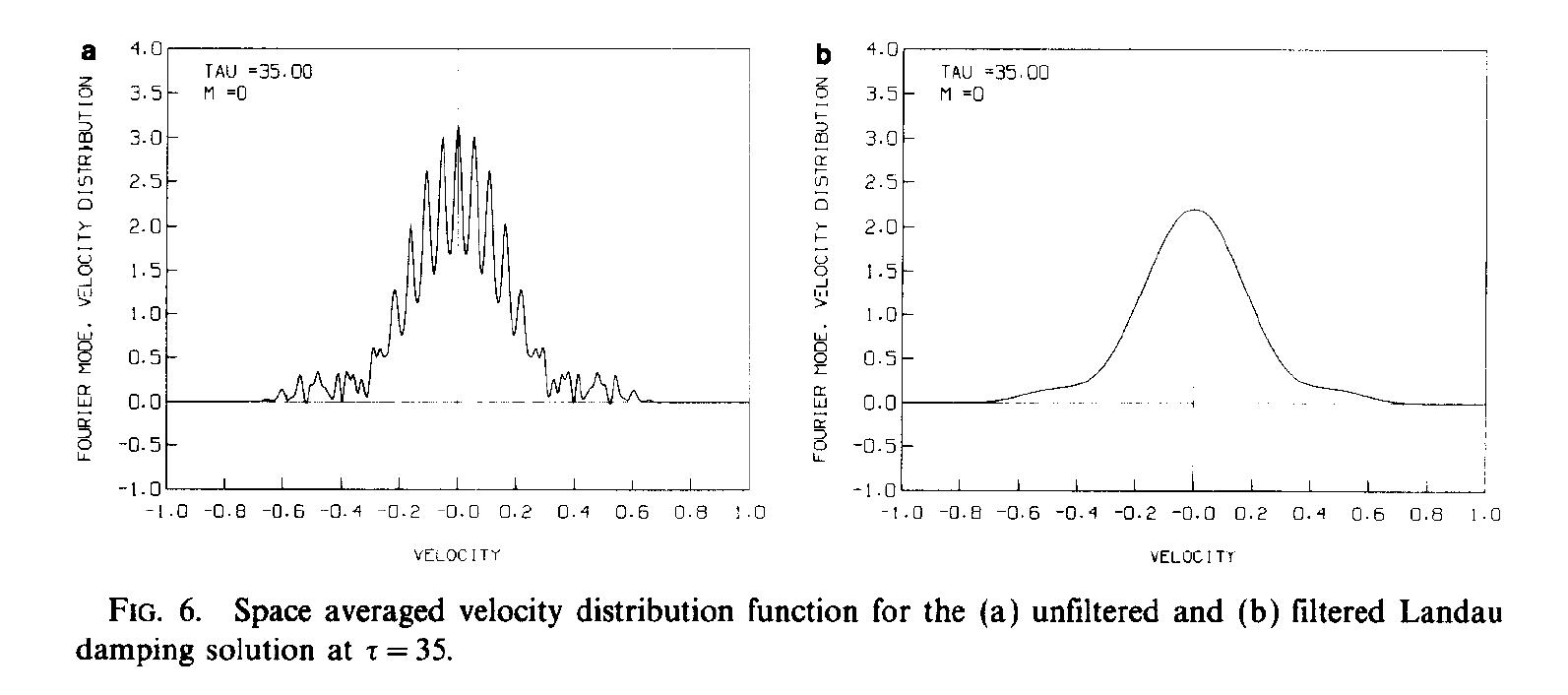
(Klimas (1987)).
5.10 Filamentation
6.2 What is the dispersion?
- Any relation between wave frequency \(\omega\) and its wavelength \(\lambda\)
- Typically used wavenumber \(k = \frac{2\pi}{\lambda}\)
- For medium, the relation is an implicit function \(\Phi = \Phi(\omega,k)\)
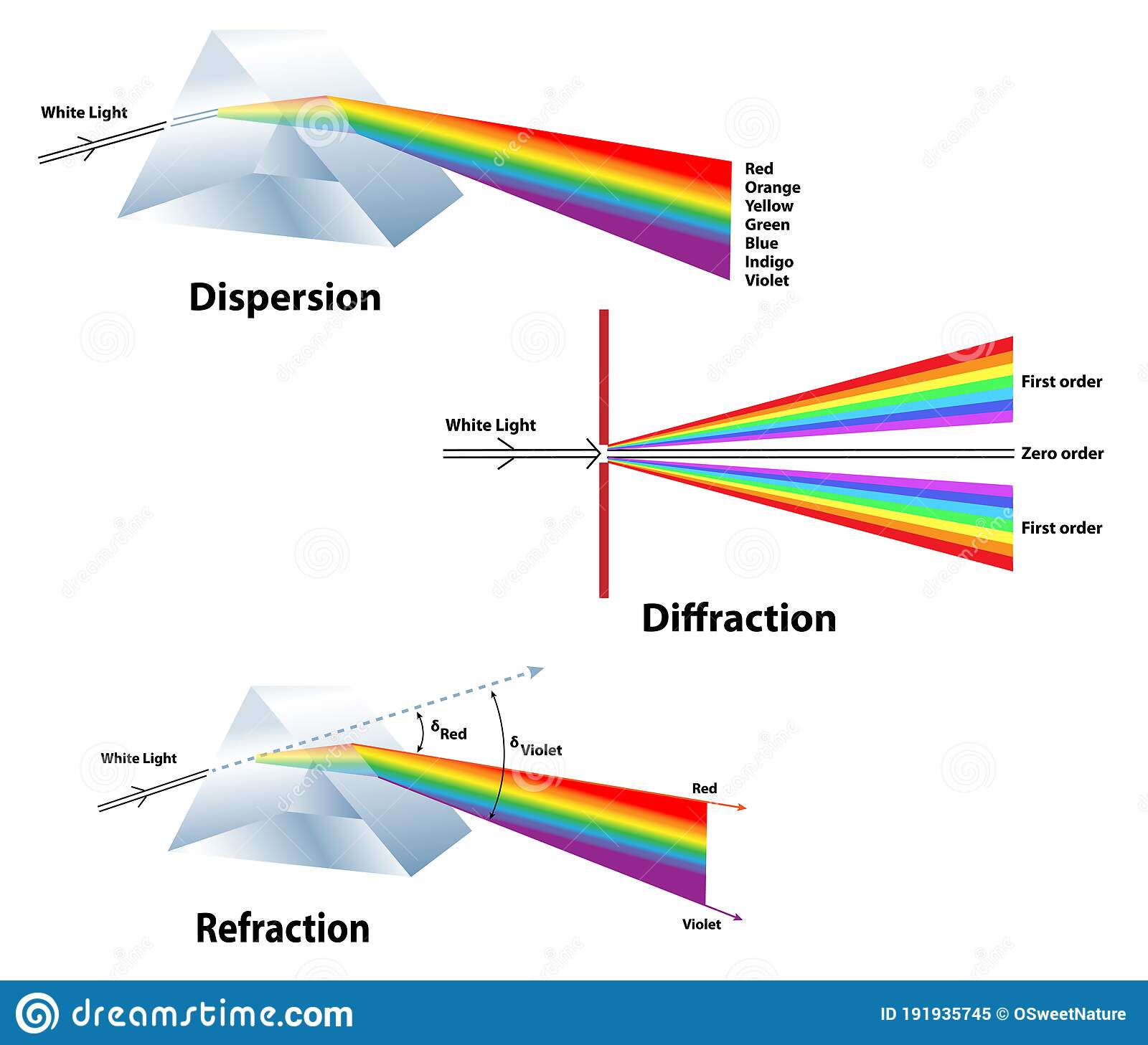
Comparison of dispersion, diffraction, and refraction in solids.
6.3 Why use a linear approach?
6.5 Plasma properties of our interest
- Solutions of dispersion relation \((\omega, k)\) are not a finite set of numbers
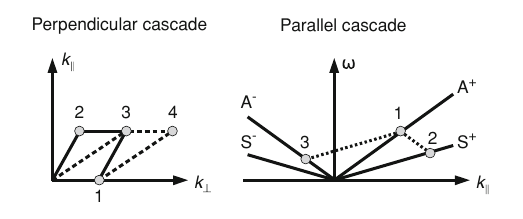
- They form “dispersion branches” - continuous set (curves) of solutions in \(\omega - k\)
- Example of Bernstein waves
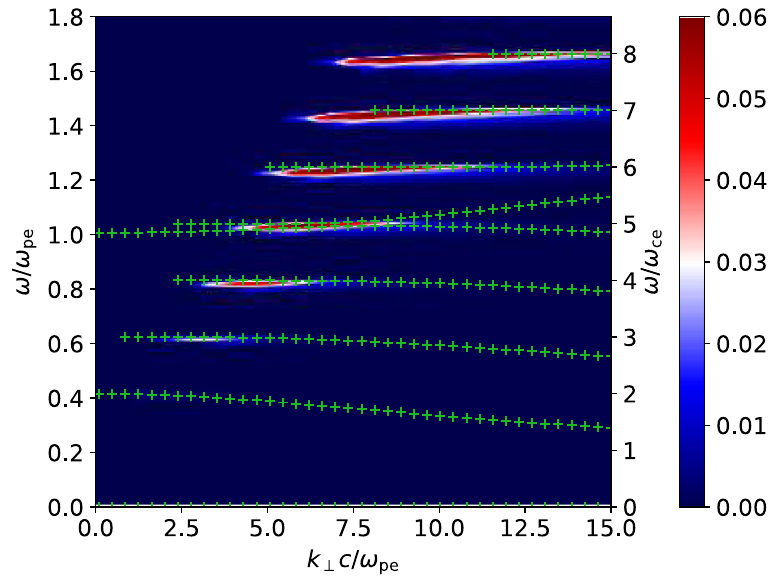
Green pluses: real solutions, color scale: wave growth rates. (Benáček & Karlický 2019).
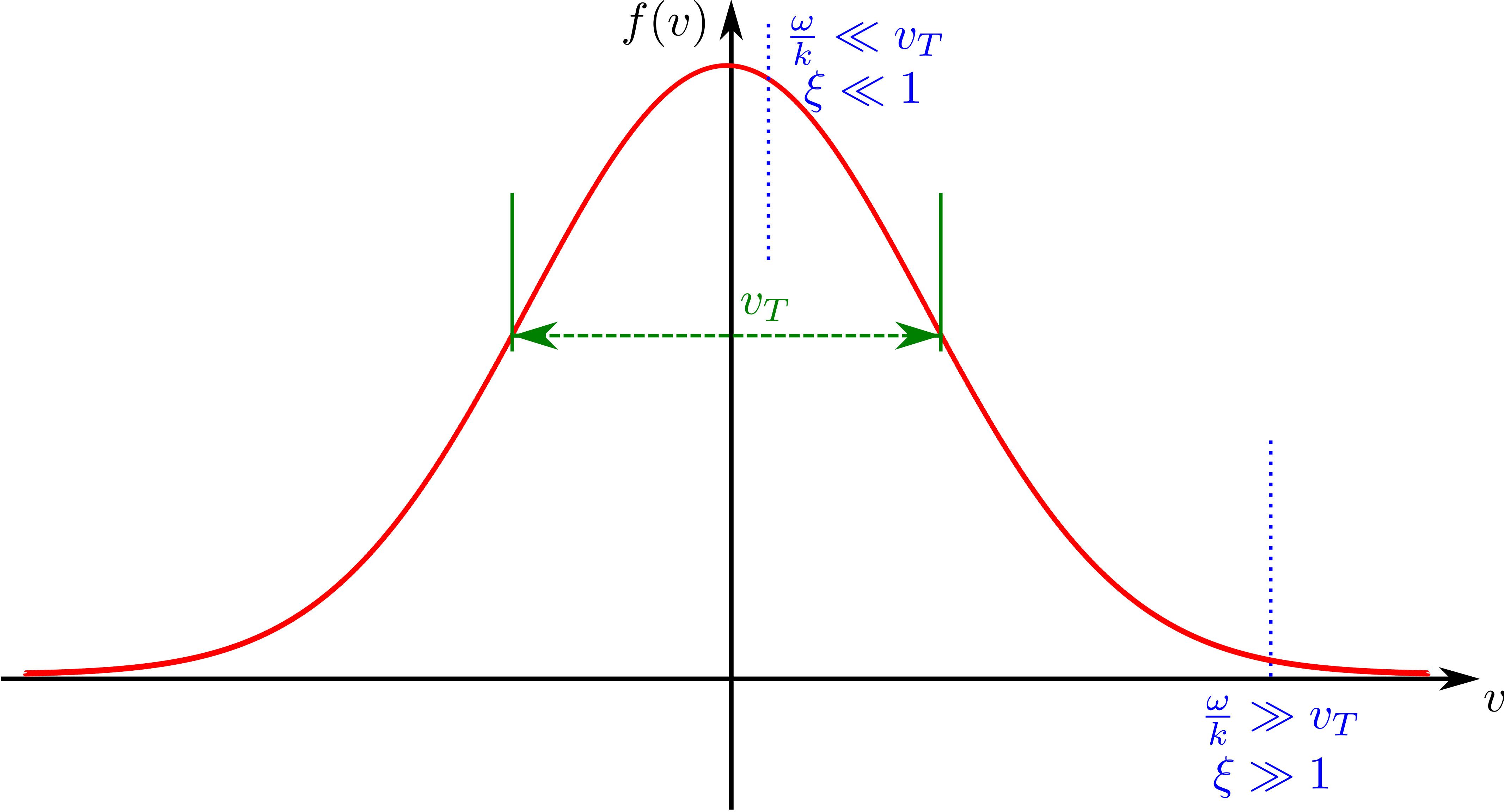
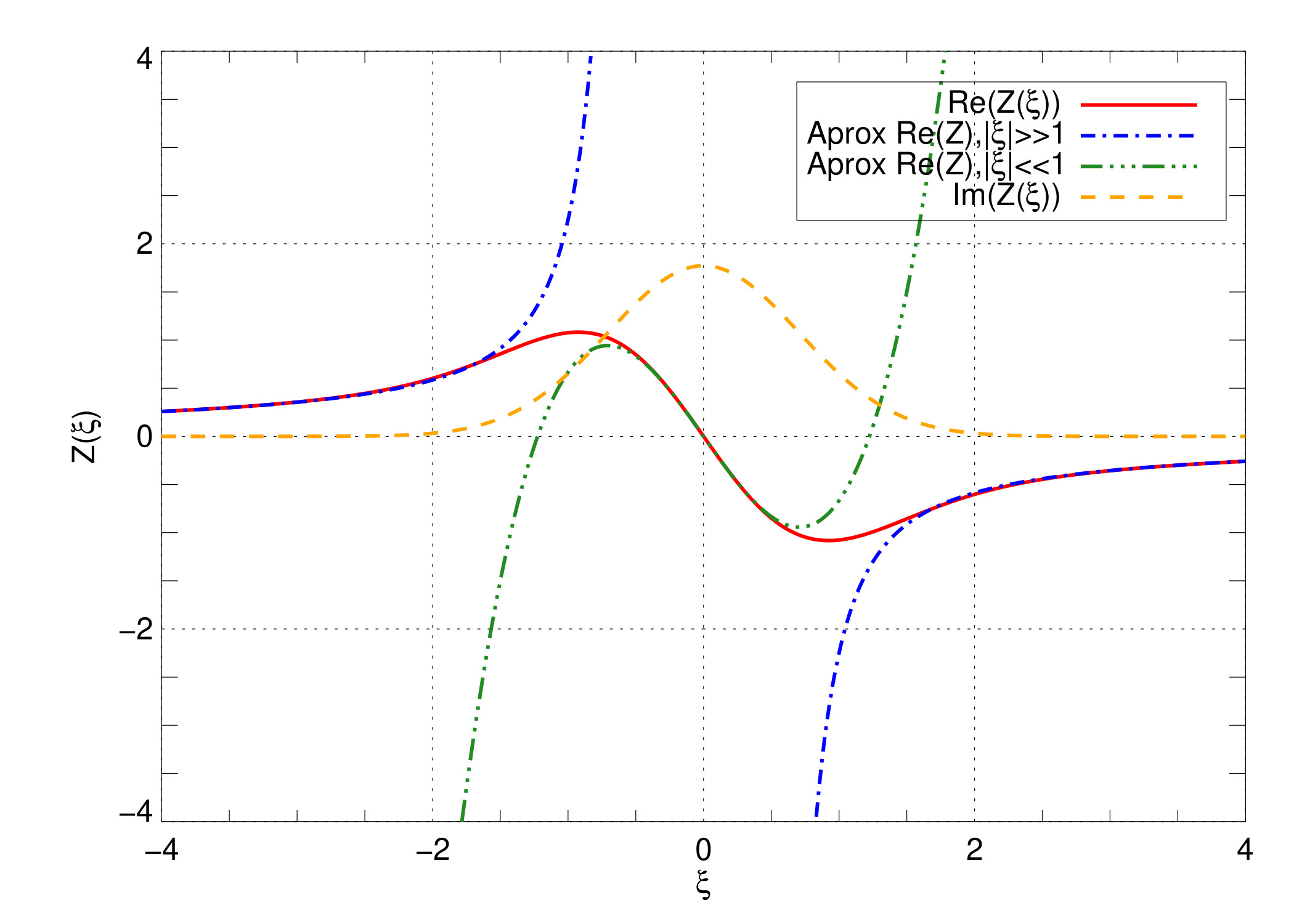
8.8 The plasma dispersion function
- If \(\zeta<1\), \(exp(-x^2)\) is significant at the resonance \(\omega_r=\vec{k}\cdot\vec{v}\), particles satisfying this condition are said to be in Landau resonance with the wave, such that \(\vec{E}_1\cdot\vec{v}\) is constant.
8.9 Landau procedure
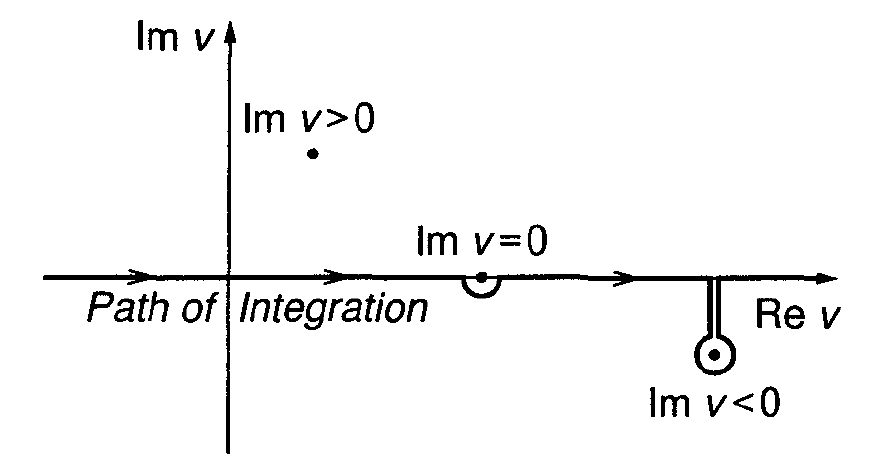
- The integrand of \(Z\) has a singularity at \(\omega=\vec{k}\cdot\vec{v}\), so the contour of integration for \(v_k=\vec{v}\cdot\vec{k}/k\) must be specified.
- Landau (1946) proposed the right solution: the contour must pass below the singularity, regardless the value of \(\gamma\).
- For unstable modes, the singularity lies in the upper half \(v_k\) plane, a direct integration along the real \(v_k\) axis satisfies the Landau prescription.
- For stable or damped waves with \(\gamma<0\), the Landau contour must involve an additional contribution around the singularity, the result is a function that is an analytical continuation of the function for the case \(\gamma>0\).
8.12 Solution method
- The intersections \((\omega, \gamma)\) of the contour levels at 0 can be found via improved versions of the Newton-Raphson method for a given \(\vec{k}_0\), provided a good enough initial guess, leading to \(\omega(\vec{k}_0),\gamma(\vec{k}_0)\)
- Then the process is repeated for a \(\vec{k}_0+\Delta\vec{k}\), using as a initial guess the same value found in the previous step, leading to a \(\omega(\vec{k}_0+\Delta\vec{k}),\gamma(\vec{k}_0+\Delta\vec{k})\), and so on.
- Two set of curves \(\omega=\omega(k)\) and \(\gamma=\gamma(k)\) are obtained for each one of the initial intersections.
Green pluses: real solutions, color scale: wave growth rates. (Benáček & Karlický 2019).
9.2 Electron plasma waves
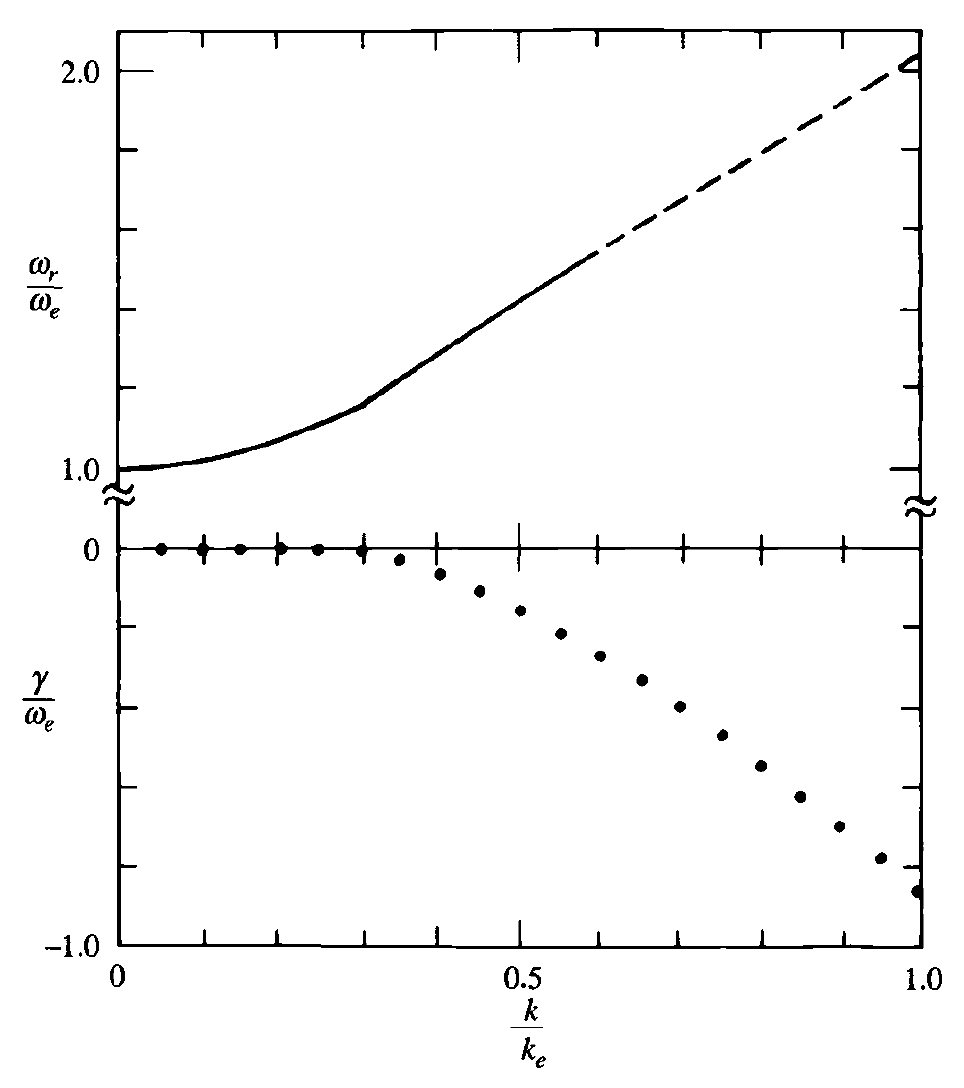
Electron plasma waves. Top panel: real frequency. Bottom panel: damping rate (Gary (1993)).
9.4 Ion acoustic waves
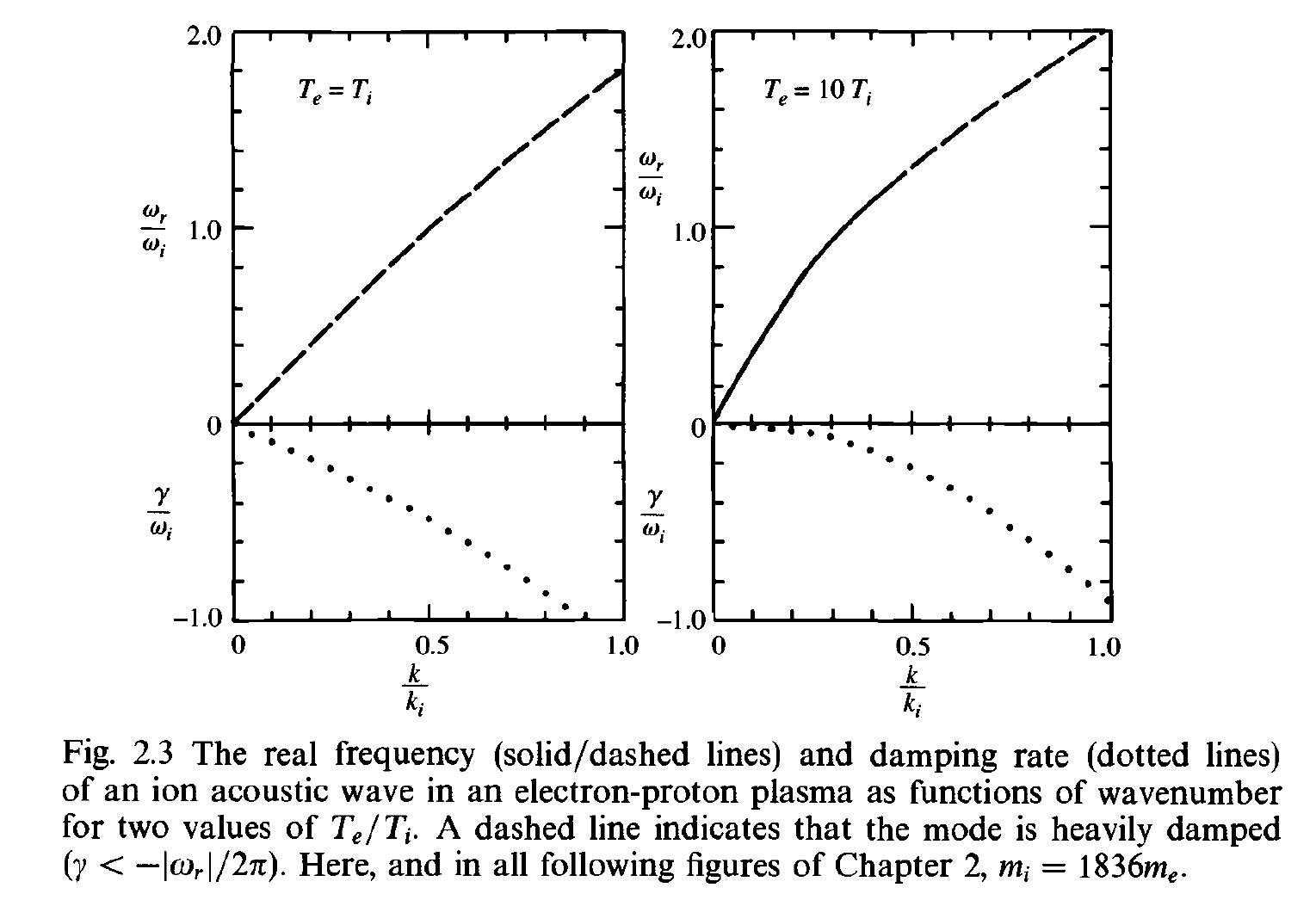
Ion acoustic waves (Gary (1993)).
11.3 Dispersion relation for a magnetized plasma
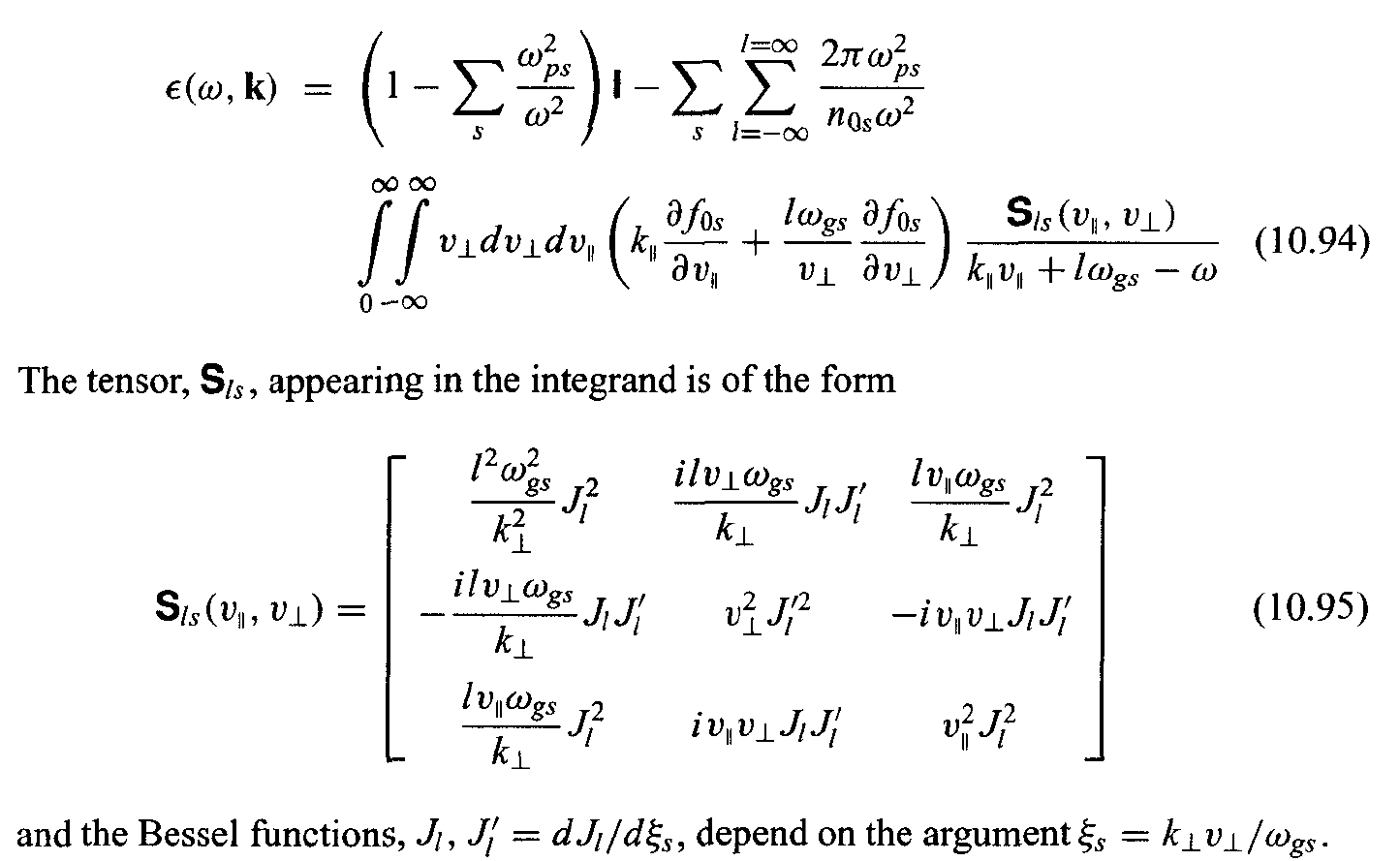
(Baumjohann and Treumann (1997))